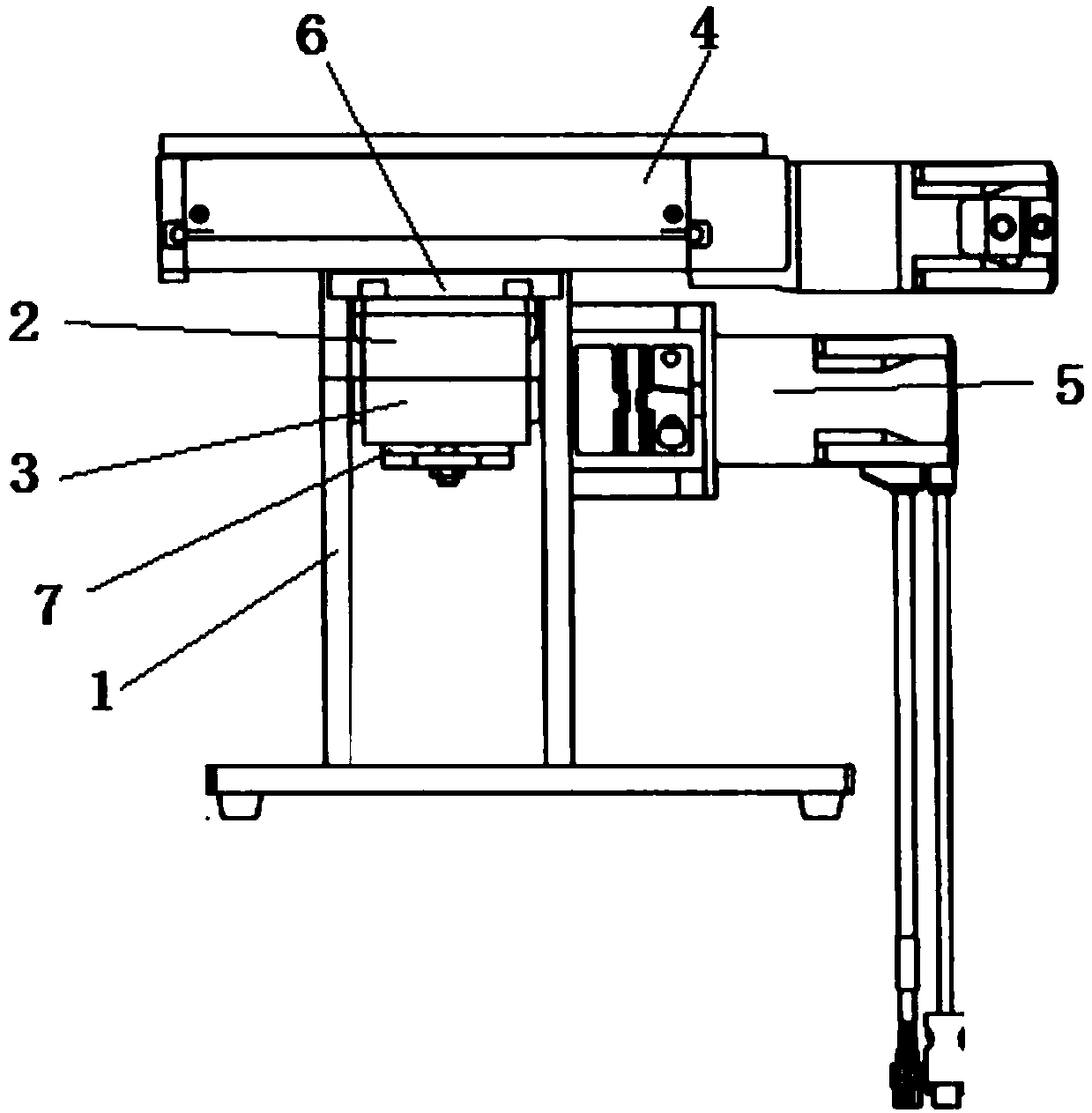
本实用新型公开了一种仿真口腔加工机器人及其控制方法,包括一支座、控制器及仿真的人体上颚和人体下颚;仿真人体上颚与设置于支座上的第一驱动装置固定连接,仿真人体下颚与设置于支座上的第二驱动装置固定连接,控制器分别与第一驱动装置、第二驱动装置电性连接,用于程序控制第一驱动装置和第二驱动装置的协同动作;第一驱动装置用于驱动仿真人体上颚做直线往复研磨运动,第二驱动装置用于驱动仿真人体下颚做旋转运动,控制仿真人体下颚与上颚间的开合。本实用新型通过第一驱动装置和第二驱动装置的交替配合,使仿真上下颚的相对运动仿照了人体咀嚼时的下颚动作,实现了高度仿真人体在咀嚼时的咀嚼动作,准确模拟食物在口腔加工中的过程,为利用体外消化系统模拟人体消化和测量食物的消化吸收提供准确数据。
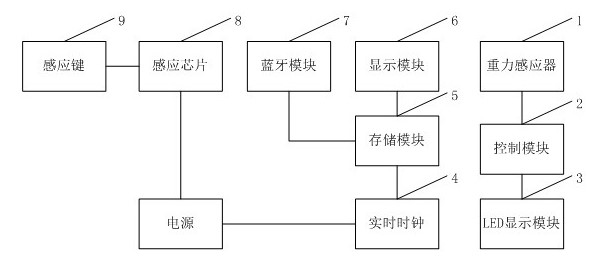
本实用新型提供一种智能用药平衡仪,包括重力感应器,控制模块和LED显示模块;所述重力感应器,用于感应所述智能用药平衡仪是否处于水平状态,向所述控制模块发送所述智能用药平衡仪是或处于非水平状态信号;所述控制模块,用于在接收到所述智能用药平衡仪是处于水平状态的信号后,向所述LED显示模块发送显示绿灯的信号;在接收到所述智能用药平衡仪处于非水平状态的信号后,向所述LED显示模块发送显示红灯的信号;所述LED显示模块,用于在收到显示绿灯的信号时,为绿灯通电;在收到显示红灯的信号时,为红灯通电。本实用新型提供的智能用药平衡仪,可以调整患者用药姿势。

本发明是一种牙科 CBCT生成全景图的数据处理方法,首先从口腔数字化体层摄影设备上获取全口牙的三维图像数据,初始化一条牙弓曲线,将其作为收缩或扩张的起点,收缩或扩张后的曲线将作为展开全景图时使用的牙弓曲线,取得曲线上每个点的坐标,并计算曲线上每个点的法线方向,设定曲线向内收缩或向外扩张的距离,将曲线上的每个点沿着该点的外法线方向或者内法线方向移动距离d;计算新曲线上某个点到原曲线上所有点的距离,根据距离阈值进行筛选,由新曲线上所有没有被舍弃的点生成一条最终曲线,按照最终曲线得到多列数据依次拼接在一起生成对应的全景图。



