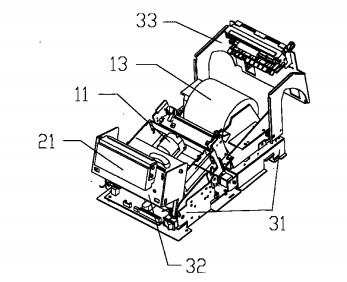
本发明公开了一种微型打印机,包括机芯模块、切刀模块、打印挡板模块以及传动系统,机芯模块的中部设有打印头,切刀模块上设有动刀,打印挡板模块上设有与打印头配合的打印挡板和与动刀配合的定刀,打印挡板模块的第一端与机芯模块的一端转动连接,第二端与机芯模块的中部可分离式卡接,切刀模块的第一端与机芯模块的另一端转动连接,第二端与机芯模块的中部可分离式卡接,且在卡接状态下打印头与打印挡板相对平行设置,动刀与定刀相对平行设置。本发明的微型打印机能够快速地解决打印介质卡住问题,方便操作者使用;其采用独特的打印挡板定位方式,能够降低打印头的冲击对打印挡板的变形影响;其传动系统精度更高,使用寿命更长。
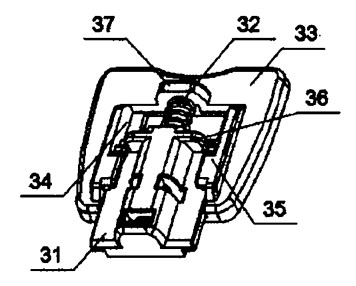
本发明公开了一种固定组件,属于机械制造领域。包括固定架、弹簧以及支撑件;所述固定架可以在所述支撑件上的滑道内滑行;支撑件的滑道边缘设置有限位点,与固定架的限位挡板配合,保证所述支撑件与所述固定架之间不会相互滑脱;弹簧连接在所述支撑件与所述固定架之间,将所述支撑件与所述固定架推向相反方向;在固定架的背面设置有连接装置,将所述固定组件固定在待安装的盒体结构上。本发明由特定结构形成一个整体,不会出现各个构件相互滑脱的现象,因此安装操作时完全可以单手完成,极其方便,适合安装空间有限的仪器。同时,固定组件与待安装盒体边框对主机面板的夹紧力由弹簧提供,不会受人工操作的影响,不会对大型机器面板造成损伤。
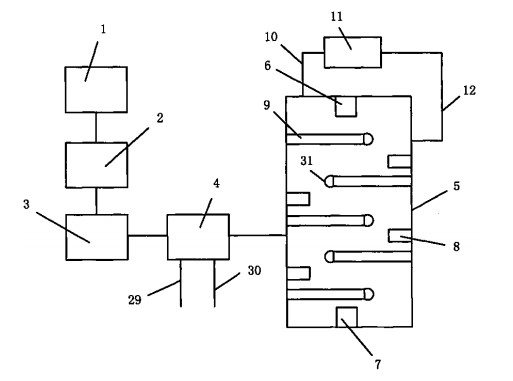
本发明公开了一种改进的CO焚烧炉SNCR脱硝装置及其脱硝方法,包括串联连接的液氨储罐、蒸发器、缓冲罐、混合器和喷射机构,喷射机构与CO焚烧炉相连,混合器上连接有旁路进气管和进风管,所述喷射机构包括位于CO焚烧炉顶部的第一喷射枪和位于CO焚烧炉底部的第二喷射枪,在CO焚烧炉中部设置有若干个第三喷射枪,第三喷射枪在CO焚烧炉的两侧交错设置,相邻两个喷射枪之间设置有隔板,CO焚烧炉顶部的排烟口连接有过滤水槽,过滤水槽通过旁路回流管连接至CO焚烧炉,旁路回流管与旁路回流管的连接点位于最高位置的第二喷射枪与第一喷射枪之间。本发明还提供了一种SNCR脱硝方法。本发明能够改进现有技术的不足,实现SNCR脱硝装置的低温高效运行。
本发明提供了一种烟气脱硫废水处理用复合混凝剂及其制备方法和应用,所述复合混凝剂包括聚合氯化铝和阳离子聚丙烯酰胺;所述阳离子聚丙烯酰胺的质量为聚合氯化铝质量的3~6%。在本发明中,所述聚合氯化铝在水中形成的一系列带正电荷的水解羟基离子,具有较强的吸附电中和及压缩双电层能力,有助于促使水中胶体脱稳;阳离子聚丙烯酰胺具有环状、链状结构,并且带有亲水基团,具有很强的吸附架桥能力,以较少的用量即可在胶体脱稳的基础上,充分发挥网捕和架桥的优势,进而利于悬浮颗粒物的充分吸附,提高烟气脱硫废水中悬浮颗粒物的去除率。实施例的结果表明,本发明提供的复合混凝剂对烟气脱硫废水中悬浮颗粒物的去除率高达95~99%。
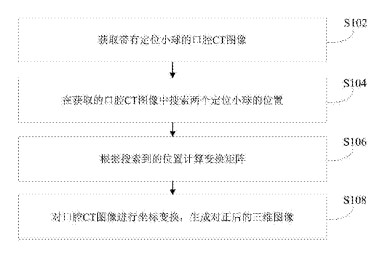
本发明提供了一种三维头颅图像对正方法及装置,应用于口腔CT,该方法包括:获取带有定位小球的口腔CT图像;在获取的所述口腔CT图像中搜索两个定位小球的位置;根据搜索到的所述位置计算变换矩阵;对所述口腔CT图像进行坐标变换,生成对正后的三维图像。通过本发明,提高了三维头颅图像对正的准确性和便捷性。

公开了一种辐射成像设备及方法。该设备在CT设备上增加非辐射传感器,用来获取射线源及探测器表面距离被扫描物体表面的距离,进一步的得到被扫描物体的尺寸和外轮廓信息,并通过该信息实时控制自动准直系统调节射线束流宽度、强度和/或探测器位置,并将该信息发送给数据重建系统用于CT断层重建。
本发明公开了一种用于旋转结构中的线缆连接装置,包括一固定部件,通过轴与固定部件连接的旋转部件,所述的线缆连接装置包括一拖链,以及一导轨,拖链在导轨内滑动,导轨的外侧设置有容纳拖链进入的入口;拖链的两端分别与相对固定端和相对活动端连接,相对活动端设置在导轨内,相对活动端为中空可旋转结构,线缆穿出拖链后直接进入相对活动端的中心孔。本发明由于采用上述结构,根据需求,当旋转结构需要旋转2a角度(360°<2a<720°)时,拖链活动端旋转±α即可完成旋转结构所需总角度。

本发明是一种牙科 CBCT生成全景图的数据处理方法,首先从口腔数字化体层摄影设备上获取全口牙的三维图像数据,初始化一条牙弓曲线,将其作为收缩或扩张的起点,收缩或扩张后的曲线将作为展开全景图时使用的牙弓曲线,取得曲线上每个点的坐标,并计算曲线上每个点的法线方向,设定曲线向内收缩或向外扩张的距离,将曲线上的每个点沿着该点的外法线方向或者内法线方向移动距离d;计算新曲线上某个点到原曲线上所有点的距离,根据距离阈值进行筛选,由新曲线上所有没有被舍弃的点生成一条最终曲线,按照最终曲线得到多列数据依次拼接在一起生成对应的全景图。



