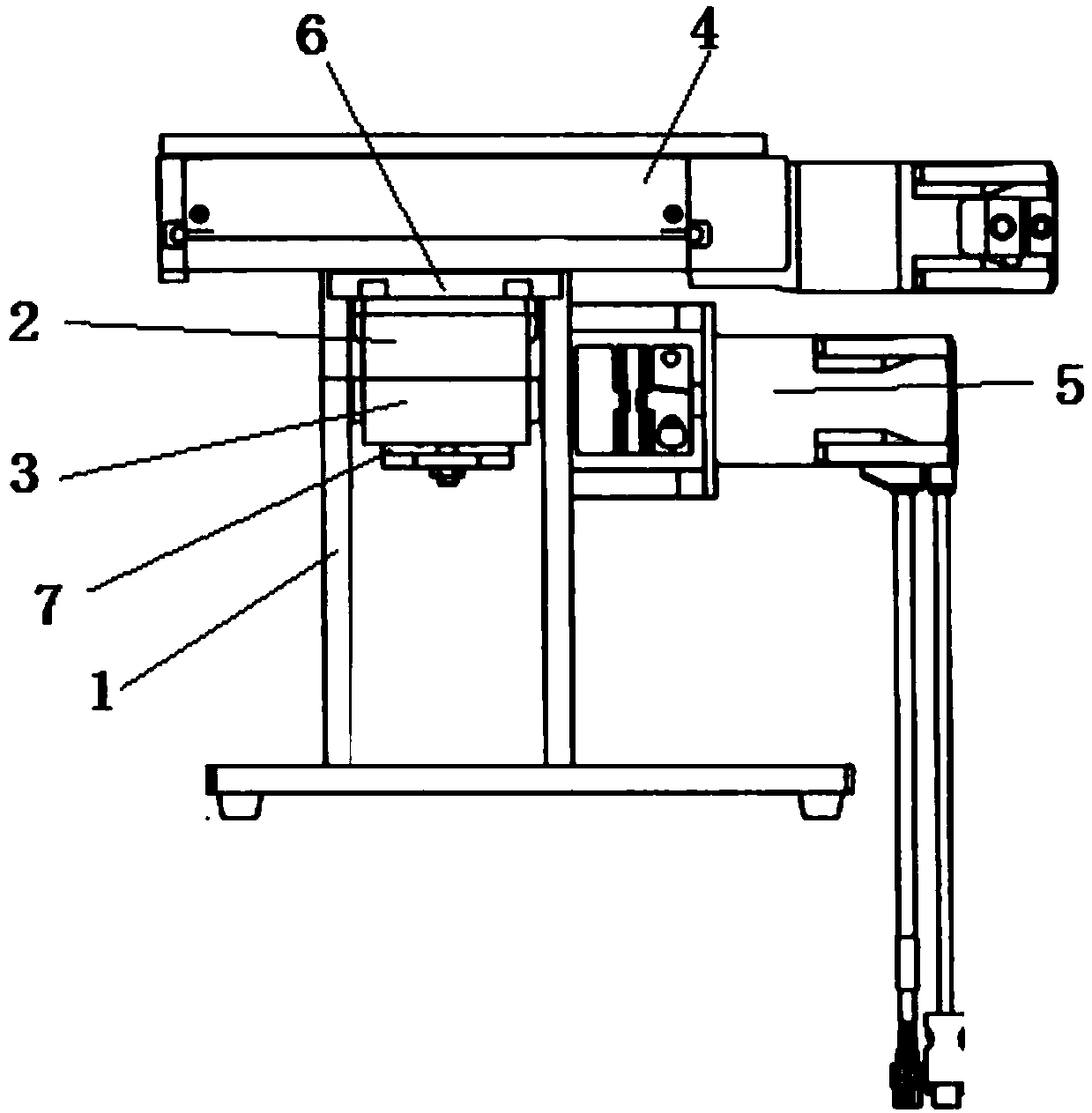
本实用新型公开了一种仿真口腔加工机器人及其控制方法,包括一支座、控制器及仿真的人体上颚和人体下颚;仿真人体上颚与设置于支座上的第一驱动装置固定连接,仿真人体下颚与设置于支座上的第二驱动装置固定连接,控制器分别与第一驱动装置、第二驱动装置电性连接,用于程序控制第一驱动装置和第二驱动装置的协同动作;第一驱动装置用于驱动仿真人体上颚做直线往复研磨运动,第二驱动装置用于驱动仿真人体下颚做旋转运动,控制仿真人体下颚与上颚间的开合。本实用新型通过第一驱动装置和第二驱动装置的交替配合,使仿真上下颚的相对运动仿照了人体咀嚼时的下颚动作,实现了高度仿真人体在咀嚼时的咀嚼动作,准确模拟食物在口腔加工中的过程,为利用体外消化系统模拟人体消化和测量食物的消化吸收提供准确数据。
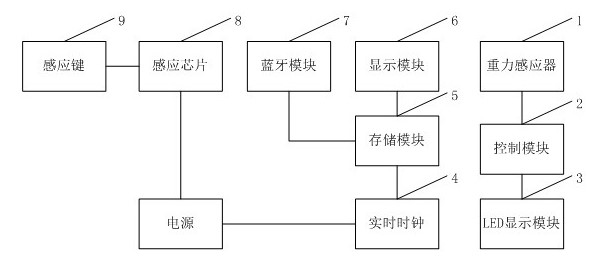
本实用新型提供一种智能用药平衡仪,包括重力感应器,控制模块和LED显示模块;所述重力感应器,用于感应所述智能用药平衡仪是否处于水平状态,向所述控制模块发送所述智能用药平衡仪是或处于非水平状态信号;所述控制模块,用于在接收到所述智能用药平衡仪是处于水平状态的信号后,向所述LED显示模块发送显示绿灯的信号;在接收到所述智能用药平衡仪处于非水平状态的信号后,向所述LED显示模块发送显示红灯的信号;所述LED显示模块,用于在收到显示绿灯的信号时,为绿灯通电;在收到显示红灯的信号时,为红灯通电。本实用新型提供的智能用药平衡仪,可以调整患者用药姿势。
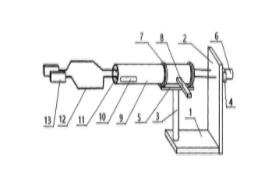
内窥镜微创手术两用弹性旋转钳剪,包括后支板(2)、弹性手持把手(3)、连接杆固定桩(4)、管座(5)、固定环(7)、拨动杆(8)、旋转挤压套管(9)、卡槽(10)、挡杆(11)、弹性导线连接杆(12)和钳头(13);通过弹性导线连接杆与相关传动机构,实现钳头夹持和剪切交替操作,可以提高钳头工作的准确率,操作舒适灵活快捷,钳头稳定性好不晃动,缩短手术时间,减少操作者的疲劳感,减少相关并发症,方便清洗消毒,降低院内感染,能有效提高手术效率,提高手术安全性,减少手术医师和护士工作量,是一种具有极高推广价值的新型医疗器械。



