本发明提供一种遥操作机器人基于视觉的动觉示教控制方法,其步骤包括采用立体视觉技术对现场的作业对象及背景环境(障碍物)进行识别与空间信息提取;以通过视觉识别、计算出的作业对象与机器人末端间的位姿关系为参数,构建作业对象对机器人的虚拟吸引力;以机器人末端沿其速度方向与背景环境(障碍物)的距离为参数,构建机器人所受的障碍物排斥力;将作业对象虚拟吸引力、障碍物虚拟斥力以及机器人抓取物体时的真实作用力合成机器人示教力;通过主端系统与从端系统间的雅可比矩阵,将示教力向操作手柄反馈,从而实现对操作者的动觉示教。本发明相对于现有技术具有如下的优点及技术效果 :[0031] 1. 将机器智能与人类高级决策的优点有机集成,可有效提高机器人的作业效率与局部自主。[0032] 2. 降低对操作人员熟练程度的要求。[0033] 3. 对可能发生的机器人与环境间的碰撞进行预测,可有效保证机器人作业系统的安全性。[0034] 4. 能够缓解操作者控制机器人时的心理紧张及决策疲劳。[0035] 5. 控制回路具有数据量小、信息丰富、超前预测的优点,可有效避免图像时滞导致的机器人操控盲目性。一种遥操纵机器人基于视觉的动觉示教控制方法,其特征在于,包括以下步骤 :[0007] S1、采用立体视觉技术对现场的作业对象及背景环境 ( 障碍物 ) 进行识别与空间信息提取;[0008] S2、以步骤 S1 中获取的作业对象与机器人末端间的位姿关系为参数,构建作业对象对机器人的虚拟吸引力;[0009] S3、以步骤 S1 中获取的机器人末端沿其速度方向与背景环境 ( 障碍物 ) 的距离为参数,构建机器人所受的障碍物排斥力;[0010] S4、将作业对象虚拟吸引力、障碍物虚拟斥力以及机器人抓取物体时的真实作用力合成机器人示教力;[0011] S5、通过主端系统与从端系统间的雅可比矩阵,将示教力向操作手柄反馈,从而实现对操作者的动觉示教。[0012] 根据权利要求 1 所述的遥操纵机器人基于视觉的动觉示教控制方法,其特征在于,所述步骤 S1 包括 :包括以下步骤 :[0013] S11.1、将 Bumblebee 双目摄像头采用 eye-to-hand 方式固定在现场环境正上方,光轴与地面垂直,简称为环境相机;[0014] S11.2、根据环境相机图像中各像素点的颜色、灰度或纹理特征,从中剔除机器人区域及作业对象区域,以获得背景图像;[0015] S11.3、根据图像匹配及摄像机标定的结果,实时计算背景图像中各像素点的空间坐标;[0016] S11.4、采用基于空间自相关性的内插方式来预测估计所剔除的机器人区域及作业对象区域应有像素属性,并结合背景图像像素特征,生成背景环境的高程数据模型;[0017] S12.1、将 Kinect 相机采用 eye-in-hand 方式固连于机器人末端,简称为手部相机;[0018] S12.2、根据手部相机图像中各像素点的颜色、纹理特征,采用结合人口统计与区域增长的图像分割方法来提取作业对象区域,并采用分裂 - 合并算法提取该区域轮廓的近似多边形,取多边形的顶点为作业对象图像特征;[0019] S12.3、根据图像匹配及摄像机标定的结果,实时计算作业对象区域各像素点的空间坐标,并构建其 OBB(Oriented Bounding Box- 有向包围盒 ) 包围盒模型。
冲压式翼伞是一种由纺织材料构成的柔性飞行器,开伞后空气由翼伞前缘切口进入气室,在气室内形成滞止压力,使翼伞能保持较为稳定的翼形并产生升力和阻力,因此翼伞具有较高升阻比、优良的滑翔性能和可控性。拉拽伞衣后缘可以调整翼伞飞行方向和速度,实现精确着陆,克服了传统圆形降落伞飞行轨迹随风飘、落点散布大的缺点,同时翼伞在着陆时可以以雀降方式无损着陆,在战场物资精确空投、自然灾害救灾物资精确空投、航天器回收等领域有广泛应用前景,得到了国内外许多研究者的关注。为翼伞系统规划出能避开静态障碍物的归航航迹是能否实现精确空投的前提之一,很大程度上决定了翼伞的着陆精度和归航控制方式,只有在合适的规划航迹的基础上才能设计合适的航迹跟踪控制器,因此避障航迹规划对实现翼伞精确空投具有重要意义。
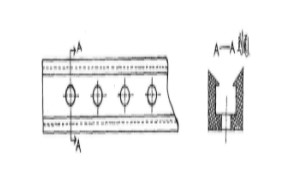
一种用于安装防寒型塑料布的装置,是专门用于在窗户上安装防寒保温塑料布的装置,为人们在冬季进行室内防寒保温工作提供了一种新型的技术方案。这种装置是由一种U型槽和与之相对应的压条组成。具体实施方案是将这种U型槽安装在窗户四周的墙壁上,然后将塑料布的四周用压条挤压进U型槽内,从而实现对窗户的密封工作。
本发明涉及抑菌凝胶技术领域,具体涉及一种抑菌凝胶及其制备方法,每升抑菌凝胶由以下原料组成:苯扎氯铵1.7-1.9g、甘油30-50ml、薄荷醇0.1-1.3g、明矾1-1.8g、乳酸0.3-0.4g、卡波姆2.5-5g、中药提取物3-6g、纯化水余量,本发明含有多种抗炎、抗菌、镇痛成分,通过各原料间的协同作用,抑菌效果最佳,其生物相容性符合GB/T16886.11-2011,微生物指标符合GB15979-2002。适用于各种阴道细菌性感染、滴虫性感染、白带、念珠菌性感染、宫颈和生殖道或粘膜创面感染的护理,促进宫颈糜烂物理治疗后创面的愈合。还适用于内痔、外痔、混合痔、肛裂、肛肠手术后护理。

技术领域:本发明涉及电力输送领域,尤其涉及一种操作简单、可快速检查输电线路漏电位置的可重复利用的架空线路漏电寻址仪。背景技术:在现有的电力输送线路当中,尤其是0.4KV和10KV的输电线路当中,经常会出现输电线路与树枝或其他接地导体接触、变压器故障、避雷器损坏、瓷瓶老化等接地而发生较大的漏电现象需要电工排查维修。(科技成果评价)现有的检测方式是通过在输电线路上间隔一段距离安装架空线路故障指示器,通过电磁感应翻牌指示漏电区域。但该种方式不能准确判断漏电的具体位置,需要维修工人沿着线路逐渐排查,这对于后段线路长或者穿过山林的区域尤其困难,增加了维修工人的工作难度,也降低了工作效率;同时架空线路故障指示器长年设置于室外且为封闭式设计,电池不到半年就消耗完就只能整体式更换,不能做到重复利用,同时增加购买指示器的成本和人工更换难度;而且,现用的架空线路故障指示器在线路恢复正常后需要近6个小时才能恢复到正常指示,反应慢。(科技成果评价)进一步,如果遇到雷电天气6小时出现别一处漏电情况且无法指示,不能适应目前快速高效的用电维护需求。发明内容:本发明目的在于提供一种操作简单、可快速检查输电线路漏电位置的可重复多次利用的架空线路漏电寻址仪。与现有技术相比,本发明的优点在于:1、此寻址仪用于10kv电力线路漏电的快速精准查找到漏电点(误差1Cm),极大的提高了输电线路漏电维护的快速响应;2、将钳形漏电测试装置和工频逆变装置巧妙融合一体,且体积少,重量轻,操作简单;3、可多次重复使用,避免了人工更换架空线路故障指示器,同时也降低了使用成本,便于推广应用。

本发明是一种基于链路代价转换的卫星负载平衡方法,该方法是在卫星虚拟拓扑策略的基础上,对拓扑快照进行LEO(低轨)层链路代价转换和分层分流。因此,利用卫星星座运行的可预测性和周期性,将系统运行时间划分为若干个相同的时间段,并在每个时间段个分n个间隙tp,每个时隙内对星间链路进行链路过载判断。对全球覆盖区域进行拥塞等级划分,配合LEO卫星链路实时流量,在链路拥塞时进行代价调整和路径优化,平衡整个网络的流量。并在此基础上配合MEO层卫星网络,对不同服务质量(QoS)的传输业务进行合理的路径选择,在满足高优先级业务时延的同时,提高整网的吞吐量。

一种呼吸集成装置的设计,即一种运动雾化加湿口罩(201621392920.3),这是一种主要针对跑步、登山等运动的口罩。主要功能特点如下: 1.核心功能:加湿和净化功能,满足人在跑步时的必要需求。该专利产品利用超声波雾化技术释放大量湿气滋润口鼻,解决人们跑步时总会口干舌燥、喉咙干燥的问题,让跑步更舒服。同时通过负离子净化吸入空气,保证用户呼吸到更干净的空气,让跑步更健康。 2.该产品除了针对跑步外,其加湿和净化的功能,同理还可适用于登山、骑行等各种相对剧烈的运动中。 3.同时,该产品加湿滋润、净化的功能,对于生活在北方干燥雾霾环境中的人而言,不仅可以在运动中使用,更可以在日常出行中使用,加湿和净化的功能正好对应干燥和雾霾两种气候现象。 4.该产品生产成本和普通口罩基本相似,投产成本也相当低。在和普通口罩相似的价格下,消费者没有理由不选择该口罩。
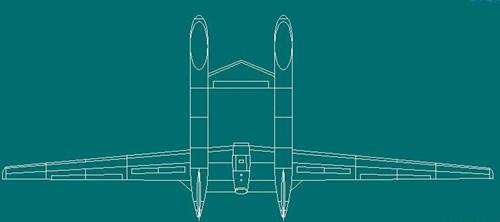
本发明提出了一种安装马格纳斯效应推进系统的高空无人机,采用双机身布局,两个机身外侧安装机翼,两个机身之间安装有马格纳斯效应推进系统和尾翼,机身头部安装有螺旋桨推进器;机翼上表面覆盖有薄膜太阳能电池。其中马格纳斯效应转子在白天可作为升力装置,在相同来流速度下,马格纳斯效应转子只需要提高转速则可大幅提高升力,即使在低速飞行时也可为无人机提供足够升力,降低无人机最小起飞速度和巡航速度,有利于无人机进行短距起降和空中低速巡航侦查;夜间,马格纳斯效应转子可作为风力发电装置,利用高空的稳定、持续的风能进行发电,避免了无人机仅能在白天获取能量密度较低的太阳能为飞行储能、从而使得机翼面积或翼展很大的不足。



