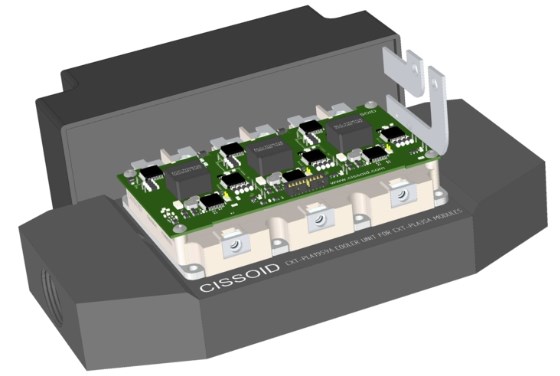
全球75%的电能须经过功率电子系统进行转换、传输与应用,智能功率全集成技术可以有效提升电能利用的效率。智能功率全集成工艺是将高压功率器件与低压控制电路集成在同一块晶圆上,其先进功率器件设计技术、智能控制单元集成技术、多维度可靠性提升技术及全集成工艺技术是国际公认的技术难题。2013年前,该类芯片的制备工艺被美欧日垄断,中国几乎100%依赖进口,是亟需突破的集成电路领域“卡脖子”技术。
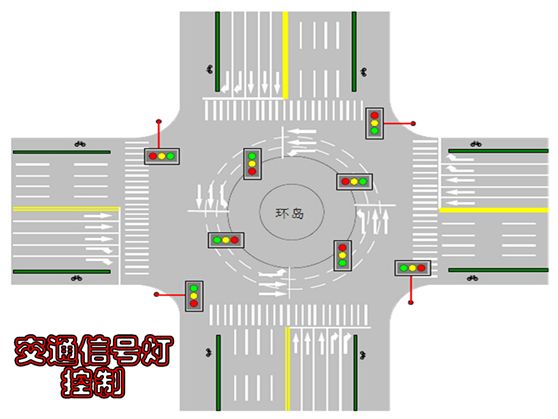
本发明公开了一种独立式自适应交通信号控制系统及其实现方法,解决现有道路交通拥堵的问题。本发明包括第一信息采集器,第二信息采集器,以及与第一信息采集器和第二信息采集器相连并用于控制交通信号灯的交通信号控制器;其中,第一信息采集器采集车道上静止车辆情况并将信息传送至交通信号控制器;第二信息采集器采集人行道需要通行行人的情况并将信息传送至交通信号控制器。本发明通过保证每一交通路口均能根据实际交通流量优化交通信号控制,使每一路口的交通通行达到最优,提高每一路口的交通通行率,从而保障整个城市交通的顺畅,减少交通拥堵,节省时间成本,实现节能减排。

本发明涉及一种浮油回收装置,其包括吸油器、泵、油水分离器,吸油器包括浮油箱、斜挡板、底板、吸油盘、吸油管,以及控制系统,浮油箱内设置隔板;隔板顶部与侧部均与浮油箱箱体相接,底端与浮油箱箱体底部之间设置供油液进入的通道口,通道口低于斜挡板之顶端,斜挡板顶端低于吸油盘吸口;在浮油箱上部设置真空箱及真空泵,真空箱与斜挡板分置在隔板的两侧,真空箱与浮油箱相通。这种结构,在真空的作用下,吸油盘所在腔体内的回油液面高于斜挡板一侧的液面,并可通过真空度,可控制回油液面与吸油盘吸口的高度差,使高度差保持在一定范围内,从而让吸油盘吸口始终没入回油液面的下方,有效防止空气的吸入,防止降低回油效率。
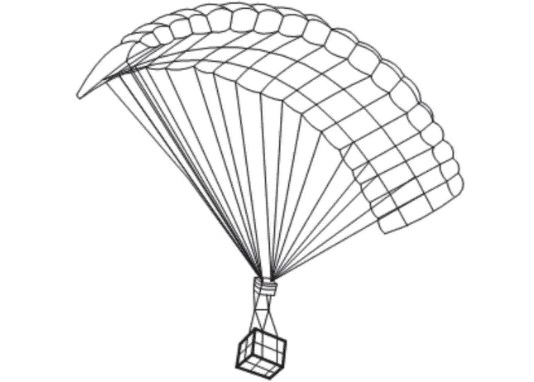
冲压式翼伞是一种由纺织材料构成的柔性飞行器,开伞后空气由翼伞前缘切口进入气室,在气室内形成滞止压力,使翼伞能保持较为稳定的翼形并产生升力和阻力,因此翼伞具有较高升阻比、优良的滑翔性能和可控性。拉拽伞衣后缘可以调整翼伞飞行方向和速度,实现精确着陆,克服了传统圆形降落伞飞行轨迹随风飘、落点散布大的缺点,同时翼伞在着陆时可以以雀降方式无损着陆,在战场物资精确空投、自然灾害救灾物资精确空投、航天器回收等领域有广泛应用前景,得到了国内外许多研究者的关注。为翼伞系统规划出能避开静态障碍物的归航航迹是能否实现精确空投的前提之一,很大程度上决定了翼伞的着陆精度和归航控制方式,只有在合适的规划航迹的基础上才能设计合适的航迹跟踪控制器,因此避障航迹规划对实现翼伞精确空投具有重要意义。
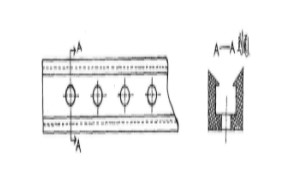
一种用于安装防寒型塑料布的装置,是专门用于在窗户上安装防寒保温塑料布的装置,为人们在冬季进行室内防寒保温工作提供了一种新型的技术方案。这种装置是由一种U型槽和与之相对应的压条组成。具体实施方案是将这种U型槽安装在窗户四周的墙壁上,然后将塑料布的四周用压条挤压进U型槽内,从而实现对窗户的密封工作。

本发明公开了一种多刀头切削系统快速换刀机构,包括主轴支架(1)、主轴(2)、刀盘组合(3)、拨杆机构(7)和直线导轨副(8),所述的主轴支架(1)包括竖截面呈“L”形的活动支架(4)和固定支架(5),固定支架(5)的平台上设有两个相对应的滑轨结构(6),活动支架(4)的水平面嵌置在滑轨结构(6)内并与滑轨结构(6)构成滑动连接,活动支架(4)的竖端面与固定支架(5)的竖端面固定相连;主轴(2)的一端活动设置在活动支架(4)竖端面上的轴承内,主轴(2)的另一端设置在固定支架(5)竖端面上的轴承内。本发明通过分离式的主轴支架、刀盘组合与拨杆机构,完成快速置换,结构紧凑、成本低且换刀速度快。

本发明提出一种用于3D打印的膏状金属复合材料,其特征是:含有金属粉末和硅酮,按重量份计由如下原料组成:金属粉末80‑90份,硅酮5‑10份,增粘剂1‑3份,分散剂1‑2份,固化催化剂0.1‑0.5份;利用硅酮的粘接固化特性,用于金属粉末中,并通过增粘剂将金属粉末调节为一种膏状复合材料,该膏状金属复合材料具有良好的流动性和固化性,用于3D打印时,可在常温下快速挤压堆积成型,从而克服了金属3D打印以粉末形式逐层来构建对象速度慢的缺陷。成型的制品在240‑300℃左右条件下处理,能全部分解粘接材料,含有的锡熔融粘接,从而有效防止制品的形变。
本发明提供一种遥操作机器人基于视觉的动觉示教控制方法,其步骤包括采用立体视觉技术对现场的作业对象及背景环境(障碍物)进行识别与空间信息提取;以通过视觉识别、计算出的作业对象与机器人末端间的位姿关系为参数,构建作业对象对机器人的虚拟吸引力;以机器人末端沿其速度方向与背景环境(障碍物)的距离为参数,构建机器人所受的障碍物排斥力;将作业对象虚拟吸引力、障碍物虚拟斥力以及机器人抓取物体时的真实作用力合成机器人示教力;通过主端系统与从端系统间的雅可比矩阵,将示教力向操作手柄反馈,从而实现对操作者的动觉示教。本发明相对于现有技术具有如下的优点及技术效果 :[0031] 1. 将机器智能与人类高级决策的优点有机集成,可有效提高机器人的作业效率与局部自主。[0032] 2. 降低对操作人员熟练程度的要求。[0033] 3. 对可能发生的机器人与环境间的碰撞进行预测,可有效保证机器人作业系统的安全性。[0034] 4. 能够缓解操作者控制机器人时的心理紧张及决策疲劳。[0035] 5. 控制回路具有数据量小、信息丰富、超前预测的优点,可有效避免图像时滞导致的机器人操控盲目性。一种遥操纵机器人基于视觉的动觉示教控制方法,其特征在于,包括以下步骤 :[0007] S1、采用立体视觉技术对现场的作业对象及背景环境 ( 障碍物 ) 进行识别与空间信息提取;[0008] S2、以步骤 S1 中获取的作业对象与机器人末端间的位姿关系为参数,构建作业对象对机器人的虚拟吸引力;[0009] S3、以步骤 S1 中获取的机器人末端沿其速度方向与背景环境 ( 障碍物 ) 的距离为参数,构建机器人所受的障碍物排斥力;[0010] S4、将作业对象虚拟吸引力、障碍物虚拟斥力以及机器人抓取物体时的真实作用力合成机器人示教力;[0011] S5、通过主端系统与从端系统间的雅可比矩阵,将示教力向操作手柄反馈,从而实现对操作者的动觉示教。[0012] 根据权利要求 1 所述的遥操纵机器人基于视觉的动觉示教控制方法,其特征在于,所述步骤 S1 包括 :包括以下步骤 :[0013] S11.1、将 Bumblebee 双目摄像头采用 eye-to-hand 方式固定在现场环境正上方,光轴与地面垂直,简称为环境相机;[0014] S11.2、根据环境相机图像中各像素点的颜色、灰度或纹理特征,从中剔除机器人区域及作业对象区域,以获得背景图像;[0015] S11.3、根据图像匹配及摄像机标定的结果,实时计算背景图像中各像素点的空间坐标;[0016] S11.4、采用基于空间自相关性的内插方式来预测估计所剔除的机器人区域及作业对象区域应有像素属性,并结合背景图像像素特征,生成背景环境的高程数据模型;[0017] S12.1、将 Kinect 相机采用 eye-in-hand 方式固连于机器人末端,简称为手部相机;[0018] S12.2、根据手部相机图像中各像素点的颜色、纹理特征,采用结合人口统计与区域增长的图像分割方法来提取作业对象区域,并采用分裂 - 合并算法提取该区域轮廓的近似多边形,取多边形的顶点为作业对象图像特征;[0019] S12.3、根据图像匹配及摄像机标定的结果,实时计算作业对象区域各像素点的空间坐标,并构建其 OBB(Oriented Bounding Box- 有向包围盒 ) 包围盒模型。



