
一种带减震功能的废气处理装置(100),用于对具有多个内部工作站(201)的加工设备(200)的废气进行处理,其中,所述加工设备(200)包括在圆周方向上均匀排列的六个内部工作站(201),每个所述内部工作站(201)通过连管(202)与位于所述加工设备(200)中央处的所述废气处理装置(100)连通,从而将所述每个所述内部工作站(201)内产生的加工废气压送到所述废气处理装置(100)中以进行过滤,(科技成果评价)所述废气处理装置(100)包括支撑架、设置在所述支撑架内的六个废气过滤柱单元、以及在支撑架底部处而设置有用以将每个所述废气过滤柱单元与所述连管(202)连接的废气入口管道(71)的底部环形板(300)。

技术领域:本发明涉及电力输送领域,尤其涉及一种操作简单、可快速检查输电线路漏电位置的可重复利用的架空线路漏电寻址仪。背景技术:在现有的电力输送线路当中,尤其是0.4KV和10KV的输电线路当中,经常会出现输电线路与树枝或其他接地导体接触、变压器故障、避雷器损坏、瓷瓶老化等接地而发生较大的漏电现象需要电工排查维修。(科技成果评价)现有的检测方式是通过在输电线路上间隔一段距离安装架空线路故障指示器,通过电磁感应翻牌指示漏电区域。但该种方式不能准确判断漏电的具体位置,需要维修工人沿着线路逐渐排查,这对于后段线路长或者穿过山林的区域尤其困难,增加了维修工人的工作难度,也降低了工作效率;同时架空线路故障指示器长年设置于室外且为封闭式设计,电池不到半年就消耗完就只能整体式更换,不能做到重复利用,同时增加购买指示器的成本和人工更换难度;而且,现用的架空线路故障指示器在线路恢复正常后需要近6个小时才能恢复到正常指示,反应慢。(科技成果评价)进一步,如果遇到雷电天气6小时出现别一处漏电情况且无法指示,不能适应目前快速高效的用电维护需求。发明内容:本发明目的在于提供一种操作简单、可快速检查输电线路漏电位置的可重复多次利用的架空线路漏电寻址仪。与现有技术相比,本发明的优点在于:1、此寻址仪用于10kv电力线路漏电的快速精准查找到漏电点(误差1Cm),极大的提高了输电线路漏电维护的快速响应;2、将钳形漏电测试装置和工频逆变装置巧妙融合一体,且体积少,重量轻,操作简单;3、可多次重复使用,避免了人工更换架空线路故障指示器,同时也降低了使用成本,便于推广应用。
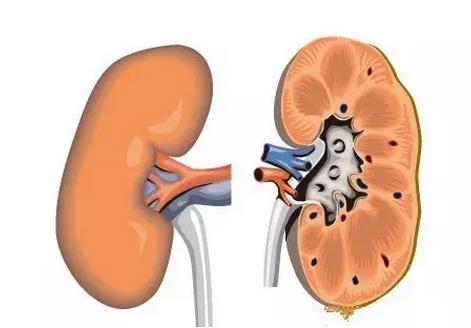
本发明公开了一种治疗肾结石的药物组合物。所述的药物组合物以下述重量份的原料制成:碎石草16-24份,金钱草5-13份,车前草5-13份,鸡内金5-13份,瞿麦5-13份,石韦5-13份为活性成分,克服现有治疗肾结石药物的不足,提供一种治疗肾结石效果较好的药物组合物。

本发明涉及抗菌液技术领域,具体涉及一种医用抗菌液及其制备方法,每升抗菌液由以下原料组成:双烷基季铵盐1.7-1.9g、甘油30-50ml、薄荷醇0.1-1.3g、乙醇3-20ml、中药提取物3-6g、纯化水余量。本发明的各原料相辅相成,各原料间发挥协同作用,中药提取物中含有的多种抗炎、抗菌、镇痛成分,使其抗菌性能达到了最佳,本发明的生物相容性符合GB/T 16886.11-2011要求,微生物指标符合GB15979-2002要求。适用于小面积皮肤、口腔感染、烧烫伤、伤口、阴道、肛门和黏膜创面感染护理,新生儿皮肤和脐部的护理、孕妇产后阴部及伤口感染的护理,促进创面愈合,减少术后感染。

本发明涉及对在细胞治疗中最为理想的脐带血间充质干细胞进行高效分离扩增的方法。已经证明脐带血中含有分化能力较高,免疫排斥反应较小的间充质干细胞。脐带血银行的建立为实现自体细胞移植提供基础。但是,由于脐带血中间充质干细胞含量极低(1×108个单核细胞中仅含有0.5-30个),因此如何高效分离和扩增这些细胞成为了阻碍脐带血间充质干细胞向临床转化的难题。目前,多利用该细胞在培养皿的吸附能力,对脐带血间充质干细胞进行分离,但是成功率低,并且在扩增过程中难以保持干细胞特性。本发明包括利用蛋白成分对培养皿进行包被,配合添加多种生长因子的培养基,构建脐带血间充质干细胞扩增环境,实现了该细胞的高效扩增和分离。
本发明公开了分离富集外周血中造血干细胞(hematopoietic?stem?cell,HSC)的方法,更好地为造血干细胞进行后续研究提供基础,涉及生物医学领域。方法包括树状超支聚合物与鼠抗人造血干细胞单克隆抗体共价偶联、鼠抗人造血干细胞单克隆抗体修饰的树状超支聚合物再包被长链生物素分子、鼠抗人造血干细胞单克隆抗体和长链生物素共修饰的树状超支聚合物捕获外周血样品中的造血干细胞、链霉亲和素修饰的纳米磁珠识别并偶联外周血中长链生物素化树状超支聚合物、被捕获造血干细胞的分离及重悬等步骤。重悬液可以直接进行后续分析,与传统的细胞分离方法相比,该方法更适用于在复杂外周血样品中对造血干细胞进行磁分离,提高了外周血样品中造血干细胞分离效率。

本发明是一种基于链路代价转换的卫星负载平衡方法,该方法是在卫星虚拟拓扑策略的基础上,对拓扑快照进行LEO(低轨)层链路代价转换和分层分流。因此,利用卫星星座运行的可预测性和周期性,将系统运行时间划分为若干个相同的时间段,并在每个时间段个分n个间隙tp,每个时隙内对星间链路进行链路过载判断。对全球覆盖区域进行拥塞等级划分,配合LEO卫星链路实时流量,在链路拥塞时进行代价调整和路径优化,平衡整个网络的流量。并在此基础上配合MEO层卫星网络,对不同服务质量(QoS)的传输业务进行合理的路径选择,在满足高优先级业务时延的同时,提高整网的吞吐量。
本发明提供一种遥操作机器人基于视觉的动觉示教控制方法,其步骤包括采用立体视觉技术对现场的作业对象及背景环境(障碍物)进行识别与空间信息提取;以通过视觉识别、计算出的作业对象与机器人末端间的位姿关系为参数,构建作业对象对机器人的虚拟吸引力;以机器人末端沿其速度方向与背景环境(障碍物)的距离为参数,构建机器人所受的障碍物排斥力;将作业对象虚拟吸引力、障碍物虚拟斥力以及机器人抓取物体时的真实作用力合成机器人示教力;通过主端系统与从端系统间的雅可比矩阵,将示教力向操作手柄反馈,从而实现对操作者的动觉示教。本发明相对于现有技术具有如下的优点及技术效果 :[0031] 1. 将机器智能与人类高级决策的优点有机集成,可有效提高机器人的作业效率与局部自主。[0032] 2. 降低对操作人员熟练程度的要求。[0033] 3. 对可能发生的机器人与环境间的碰撞进行预测,可有效保证机器人作业系统的安全性。[0034] 4. 能够缓解操作者控制机器人时的心理紧张及决策疲劳。[0035] 5. 控制回路具有数据量小、信息丰富、超前预测的优点,可有效避免图像时滞导致的机器人操控盲目性。一种遥操纵机器人基于视觉的动觉示教控制方法,其特征在于,包括以下步骤 :[0007] S1、采用立体视觉技术对现场的作业对象及背景环境 ( 障碍物 ) 进行识别与空间信息提取;[0008] S2、以步骤 S1 中获取的作业对象与机器人末端间的位姿关系为参数,构建作业对象对机器人的虚拟吸引力;[0009] S3、以步骤 S1 中获取的机器人末端沿其速度方向与背景环境 ( 障碍物 ) 的距离为参数,构建机器人所受的障碍物排斥力;[0010] S4、将作业对象虚拟吸引力、障碍物虚拟斥力以及机器人抓取物体时的真实作用力合成机器人示教力;[0011] S5、通过主端系统与从端系统间的雅可比矩阵,将示教力向操作手柄反馈,从而实现对操作者的动觉示教。[0012] 根据权利要求 1 所述的遥操纵机器人基于视觉的动觉示教控制方法,其特征在于,所述步骤 S1 包括 :包括以下步骤 :[0013] S11.1、将 Bumblebee 双目摄像头采用 eye-to-hand 方式固定在现场环境正上方,光轴与地面垂直,简称为环境相机;[0014] S11.2、根据环境相机图像中各像素点的颜色、灰度或纹理特征,从中剔除机器人区域及作业对象区域,以获得背景图像;[0015] S11.3、根据图像匹配及摄像机标定的结果,实时计算背景图像中各像素点的空间坐标;[0016] S11.4、采用基于空间自相关性的内插方式来预测估计所剔除的机器人区域及作业对象区域应有像素属性,并结合背景图像像素特征,生成背景环境的高程数据模型;[0017] S12.1、将 Kinect 相机采用 eye-in-hand 方式固连于机器人末端,简称为手部相机;[0018] S12.2、根据手部相机图像中各像素点的颜色、纹理特征,采用结合人口统计与区域增长的图像分割方法来提取作业对象区域,并采用分裂 - 合并算法提取该区域轮廓的近似多边形,取多边形的顶点为作业对象图像特征;[0019] S12.3、根据图像匹配及摄像机标定的结果,实时计算作业对象区域各像素点的空间坐标,并构建其 OBB(Oriented Bounding Box- 有向包围盒 ) 包围盒模型。



