智能椅自动对位充电方法,智能椅包括可充电电源、电能接收单元、用于定位电能接收单元的第一定位器、用于使智能椅行进和转向的运动单元,方法包括:通过第一定位器与充电设备上用于定位电能输出单元的第二定位器进行交互,从而确定第一定位器相对于第二定位器的方位数据;根据方位数据计算转向角度;通过运动单元按照转向角度使智能椅旋转至第一行进方向;通过运动单元以第一行进方向行进,并在行进过程中通过第一定位器与第二定位器进行交互,从而在行进至第一目标位置;通过运动单元按照预设角度使智能椅旋转至第二方向;通过运动单元以第二方向,从而在行进到第二目标位置后停止,使得电能输出单元能够对准电能接收单元进行充电。
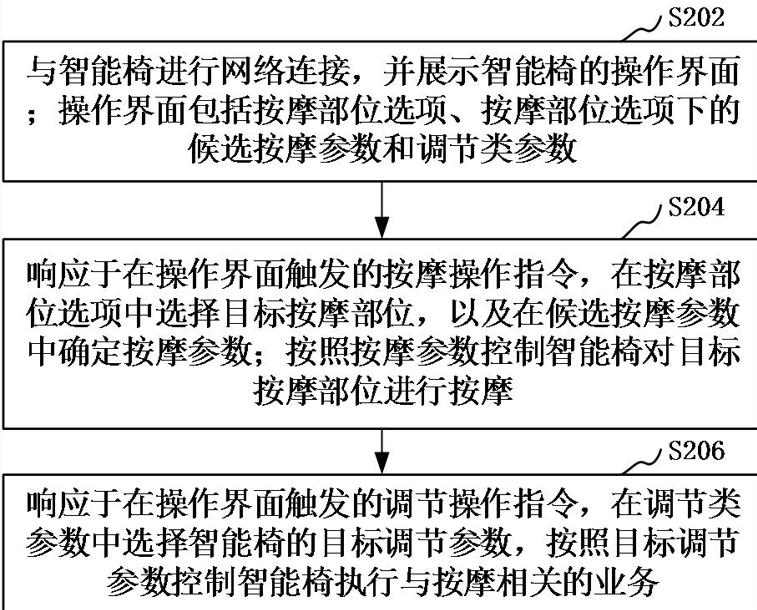
智能椅的控制方法,包括:与智能椅进行网络连接,并展示智能椅的操作界面;操作界面包括按摩部位选项、按摩部位选项下的候选按摩参数和调节类参数;响应于在操作界面触发的按摩操作指令,在按摩部位选项中选择目标按摩部位,以及在候选按摩参数中确定参数;按照参数控制智能椅对目标部位进行;响应于在操作界面触发的调节操作指令,在调节类参数中选择智能椅的目标调节参数,按照目标调节参数控制智能椅执行与按摩相关的业务。
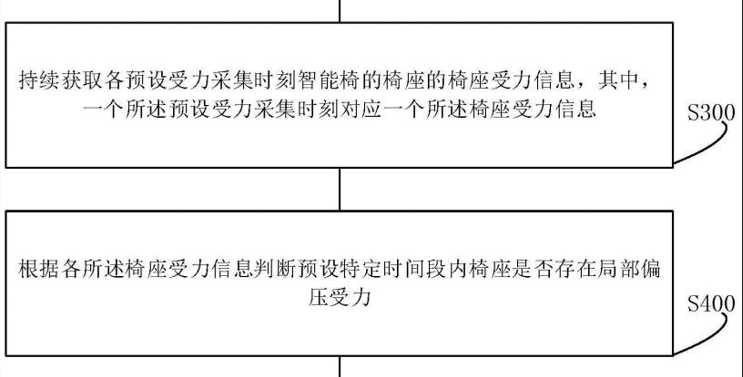
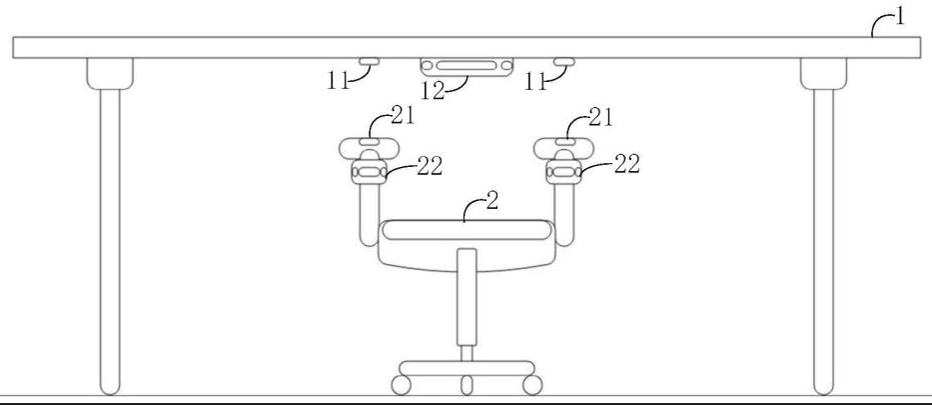
属于智能桌椅技术领域,尤其涉及一种智能椅智能操控方法及系统,所述方法通过获取智能椅预设检测区域内的扶手触摸认证信息,然后,根据所述扶手触摸认证信息判断当前用户是否具备使用权限,若判断为否,则生成不可使用提醒;若判断为是,则生成座位复位指令,并基于座位复位指令控制智能椅复位至预设使用状态,接着,持续获取各预设受力采集时刻智能椅的椅座的椅座受力信息,其中,一个预设受力采集时刻对应一个椅座受力信息;再然后,根据各所述椅座受力信息判断预设时间段内椅座是否存在局部偏压受力;最后,若判断为是,则生成坐姿矫正提醒。本发明实现真正坐姿矫正,极大满足用户的使用需求,具有极高的实用性。
产品可实现定位与传输:齿形料盒机构通常具有特定的定位结构,通过自动传输装置被准确地输送到收料位置。例如,利用导轨,精密滑道等装置将料盒平稳地移动到与封装设备出料口相对应的位置,确保位置精度,以便准确收料。适配与承接:齿形料盒的形状和尺寸与待收料的产品相适配。其齿形结构可以有效地固定和分隔产品,防止它们在收料过程中相互碰撞或移动,保证了收料的整齐性和稳定性。当产品从封装设备的出料口排出时,会按照一定的规律落入齿形料盒的相应齿槽中。

本实用新型公开了一种新型相机模组,所述新型相机模组包括一体式镜头模组、前端反射元件组、影像传感器以及电路板,一体式镜头模组包括镜筒以及安装在镜筒内的两组镜片组,前端反射元件组设于一体式镜头模组的光信号入射端,前端反射元件组将不同方向的两路光信号中至少一路光信号的光路改变并反射至一体式镜头模组内,影像传感器设于一体式镜头模组的光信号出射端并与一体式镜头模组光学耦合,影像传感器封装于电路板内。本实用新型提供的一种新型相机模组,将两组独立的相机模组集合为一个一体式镜头模组,结构设计合理,只利用一个单独的图像传感器即可实现拍摄功能,有效的克服了不同图像传感器感光参数不同带来的成像差异。
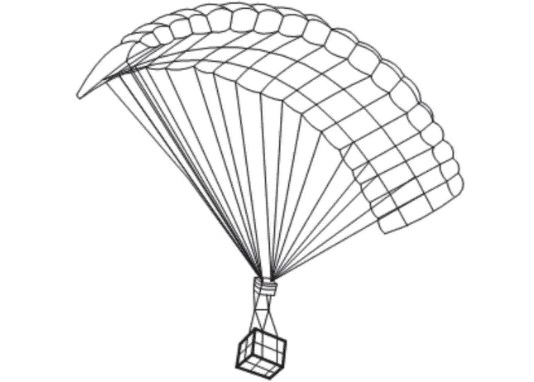
冲压式翼伞是一种由纺织材料构成的柔性飞行器,开伞后空气由翼伞前缘切口进入气室,在气室内形成滞止压力,使翼伞能保持较为稳定的翼形并产生升力和阻力,因此翼伞具有较高升阻比、优良的滑翔性能和可控性。拉拽伞衣后缘可以调整翼伞飞行方向和速度,实现精确着陆,克服了传统圆形降落伞飞行轨迹随风飘、落点散布大的缺点,同时翼伞在着陆时可以以雀降方式无损着陆,在战场物资精确空投、自然灾害救灾物资精确空投、航天器回收等领域有广泛应用前景,得到了国内外许多研究者的关注。为翼伞系统规划出能避开静态障碍物的归航航迹是能否实现精确空投的前提之一,很大程度上决定了翼伞的着陆精度和归航控制方式,只有在合适的规划航迹的基础上才能设计合适的航迹跟踪控制器,因此避障航迹规划对实现翼伞精确空投具有重要意义。
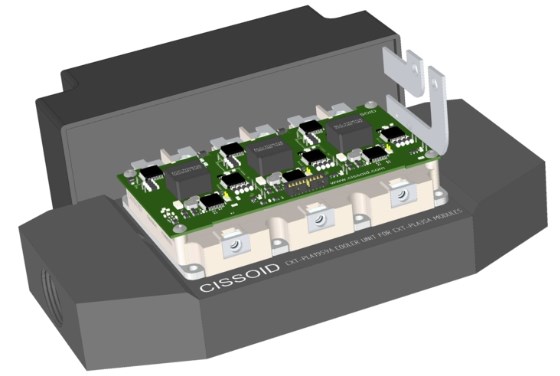
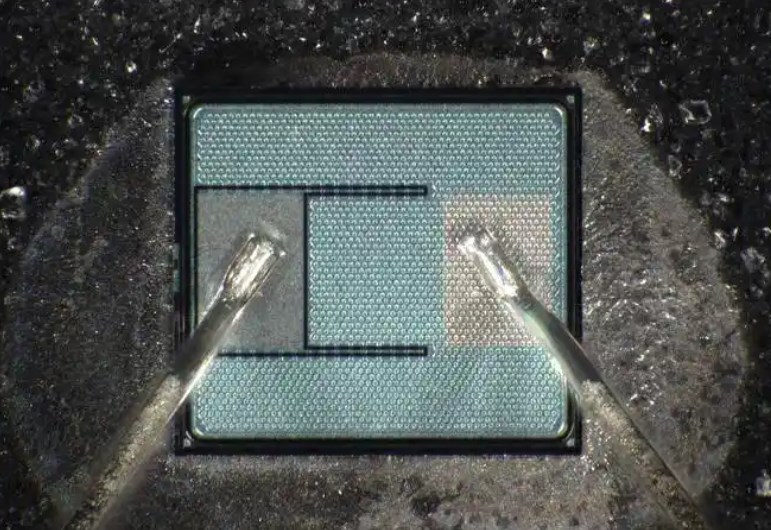
全球75%的电能须经过功率电子系统进行转换、传输与应用,智能功率全集成技术可以有效提升电能利用的效率。智能功率全集成工艺是将高压功率器件与低压控制电路集成在同一块晶圆上,其先进功率器件设计技术、智能控制单元集成技术、多维度可靠性提升技术及全集成工艺技术是国际公认的技术难题。2013年前,该类芯片的制备工艺被美欧日垄断,中国几乎100%依赖进口,是亟需突破的集成电路领域“卡脖子”技术。



