
需求内容:预灌封注射器全面自主化 参数要求: 预灌封注射器原材料中性硼硅玻璃管产品线热膨胀系数(20-300℃,×10-6/℃)为5.0±0.1,121℃颗粒耐水性1级,耐酸性1级,耐碱性2级,产品质量符合药用中硼硅玻璃管YBB00012005-2-2015。关键核心技术拥有自主知识产权。 预灌封注射器生产线全面自主化,关键核心技术具备自主知识产权,产品质量符合预灌封注射器YBB00112004-2015 需达到效果:预灌封注射器产品从原辅料到生产设备全部自主化, 实现从设计研发到生产的全产业链供应安全,年产量达到1亿支,实现95%以上的关键原辅料、生产设备自主化,形成大规模生产供应能力,单支平均成本控制在3元以内。

1、通过实时反馈传感器(如激光测距、视觉检测)动态修正加工路径,补偿材料形变或刀具磨损,确保成型精度(误差≤±0.1mm)2、实时监控设备状态、材料库存及工艺参数,通过大数据分析优化生产节拍,降低废品率(目标<1%)3、实现标志组件的精准抓取、对位与装配(如反光膜贴合、螺栓紧固),装配效率提升50%以上
满足电梯、风电制动器在各种工况下安全,可靠,高效地运行,实现准确的制动动作。在标准工作条件下及极端天气条件下(工作温度范围),制动力矩提供额定的额定力矩,在制动过程中提供稳定的制动力矩,尤其是在高速运行过程中及解除制动时,制动力矩应能迅速响应(响应时间)并保持在有效范围内。使用寿命,标准条件下,制动器应能承受至少次数的制动操作而不出现零部件损坏,制动力矩下降不超过设计目标;摩擦部件寿命应不低于标准运行时间。

1.希望解决的主要技术:固体激光器生产过程中涉及装配与调试两大关键环节,且自动装调过程中涉及自动检验、智能反馈、机械臂运动、人在环内判据等多维度技术融合。拟设计光路自动对正设备,解决人工调试费时费力问题,研究多自动化设备集成技术,解决激光器装调人工依赖程度高的问题,从而提升装调效率与质量。2.需求提出背景及主要应用领域方向:激光器在各类系统中应用广泛,服务于激光器智能制造的设备目前在民用领域已有发展,但考虑到我单位光电产品的高可靠性等要求,对自动装调设备提出了更高的要求。3.技术难点:机械臂装夹对齐精度控制、检测反馈判据确定、多设备集成融合与误差控制。4.对主要技术指标、成本、周期等有关要求:定位精度≤0.05µm(XYZ轴);角度调节精度≤0.001°(θX、θY、θZ);出胶精度≤0.01ml;视觉引导精度≤±0.01mm。
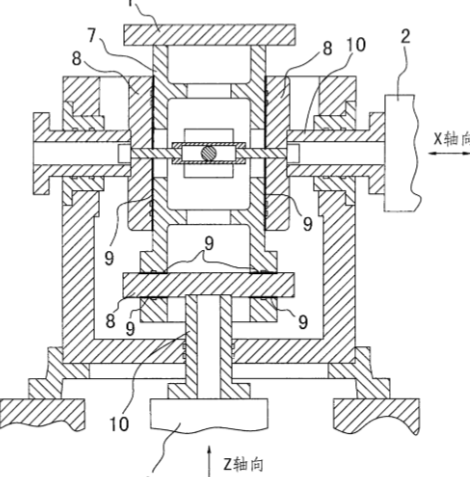
设计出一种竖向振动控制装置,加强竖向振动的隔振效果,减振后建筑上部结构满足规范舒适度要求。指标如下:支座竖向承载力≥3000kN;减振后针对居住、文教区,建筑物室内振动≤62 dB,室内二次辐射噪声≤35 dB;减振后针对商业混合区和商业中心区,室内建筑物室内振动≤67 dB,室内二次辐射噪声≤38 dB;减振后针对工业集中区,建筑物室内振动≤72dB,室内二次辐射噪声≤42dB。
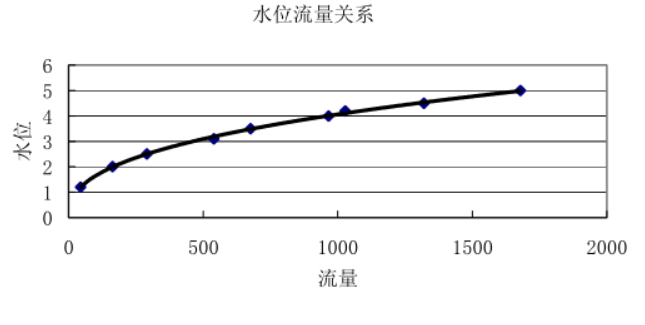
针对二次供水系统流量特征动态波动大、传统调控模式能耗高的问题,需开发一种基于流量特征智能分段的优化控制技术,实现水泵组的高效协同运行与管网压力的精准匹配。1、数据采集步骤:获取二次供水系统的用水数据,构建所述用水数据的时序流量特征曲线;2、利用最优分割算法将所述时序流量特征曲线划分成k个特征段,确定最优分段方案,其中,k≥2,且为正整数;所述最优分割步骤又包括:第一划分步骤,采用最优分割算法对所述时序流量特征曲线进行划分;第二划分步骤,以最小分段长度L下最大的波动累积离差值VL-max作为衡量标准,与各所述特征段的波动累积离差值vl进行对比,若某一特征段的波动累积离差值vl大于所述最大的波动累积离差值VL-max,则将该特征段单独提取出来,采用所述最优分割算法对所述该特征段进一步进行划分。



