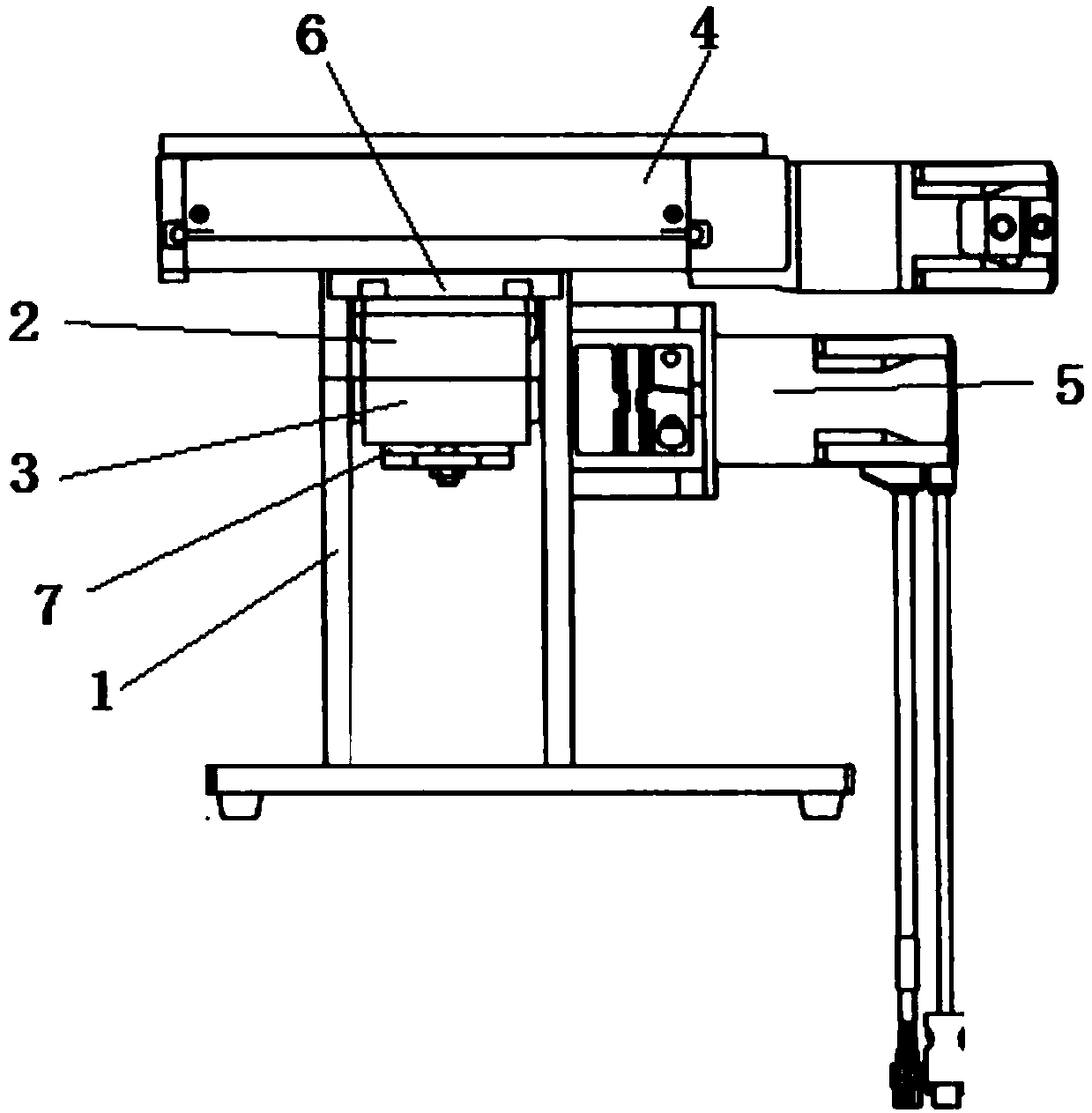
本实用新型公开了一种仿真口腔加工机器人及其控制方法,包括一支座、控制器及仿真的人体上颚和人体下颚;仿真人体上颚与设置于支座上的第一驱动装置固定连接,仿真人体下颚与设置于支座上的第二驱动装置固定连接,控制器分别与第一驱动装置、第二驱动装置电性连接,用于程序控制第一驱动装置和第二驱动装置的协同动作;第一驱动装置用于驱动仿真人体上颚做直线往复研磨运动,第二驱动装置用于驱动仿真人体下颚做旋转运动,控制仿真人体下颚与上颚间的开合。本实用新型通过第一驱动装置和第二驱动装置的交替配合,使仿真上下颚的相对运动仿照了人体咀嚼时的下颚动作,实现了高度仿真人体在咀嚼时的咀嚼动作,准确模拟食物在口腔加工中的过程,为利用体外消化系统模拟人体消化和测量食物的消化吸收提供准确数据。

一种基于主动全景视觉传感器的机器人视觉系统,包括全方位视觉传感器、关键面激光光源以及用于对全方位图像进行三维立体摄像测量、障碍物检测、避障和导航的微处理器,所述全方位视觉传感器与所述关键面激光光源配置在同一根轴心线上。

本发明公开了一种基于VR-Forces仿真平台的多无人机协同任务规划仿真系统,其特征是:多无人机协同任务规划仿真系统由n个无人机仿真子系统、一个地面控制中心仿真子系统和一个任务规划仿真场景管理子系统组成。
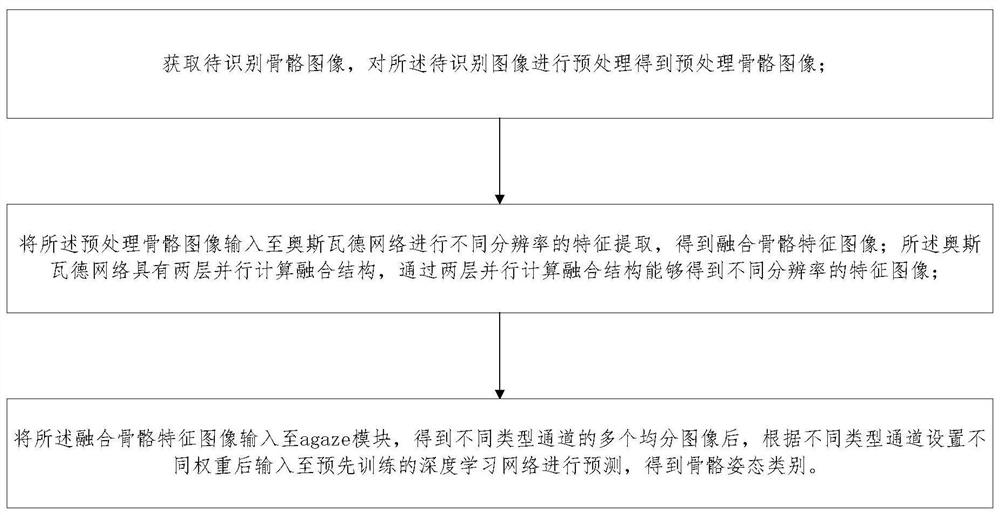
本发明实施例提供的一种基于城市智慧体育的并行融合网络的姿态识别方法和装置,该方法采用全新的奥斯瓦德网络对输入的预处理图像进行特征提取,对从高到低不同分辨率的图像进行特征提取,在整个过程中都保持高分辨率和低分辨率特征相融合后进行预测。本发明进行了多次多尺度融合,使得每一个高分辨率到低分辨率的表征都从其他并行表示中反复接收信息,从而得到丰富的高分辨率表征。因此,预测的关键点更准确,在空间上也更精确。
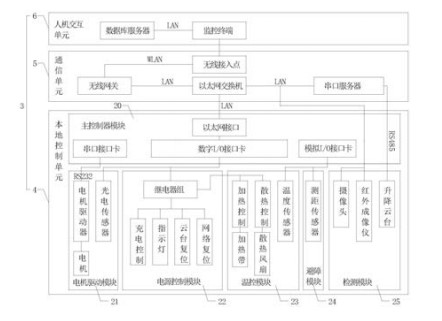
本发明提供电力设备智能巡检机器人,包括轨道总成、轨道机器人和上位机控制系统,所述轨道机器人滑动设置在所述轨道总成上,所述上位机控制系统包括本地控制单元、通信单元和人机交互单元,所述本地控制单元用于向所述轨道机器人下达各项操作指令,所述通信单元用于实现所述本地控制单元和所述人机交互单元之间的数据互通,所述人机交互单元用于实现所述轨道机器人的远端控制。本发明能够能够实现轨道机器人状态、装置信号等运行状况信息的实时采集与智能分析,还能监测温度、湿度等环境质量因素,满足电力设备的巡检作业。



