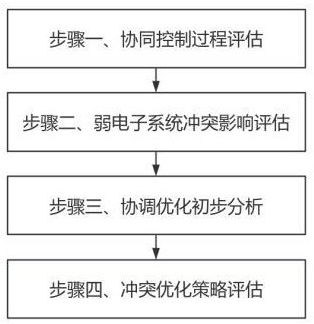
智能化弱电系统智能化控制方法,包括:协同控制过程评估:在指定建筑对应的弱电系统中,将各弱电子系统进行融合,分析各弱电子系统在融合过程中对应的控制目标冲突综合影响指标;当应用于指定建筑对应的弱电系统中,各弱电子系统的通信协议和数据格式不统一时,通过获取进行融合的各弱电子系统对应的控制目标冲突综合影响指标,控制目标冲突综合影响指标包括冲突矩阵、冲突严重程度系数和加权重要性指标,进而计算进行融合的各弱电子系统在进行融合过程中对应的控制目标冲突情况;协调优化初步分析:根据各弱电子系统在进行融合过程中对应的系统冲突情况,进而对控制目标冲突情况为严重的各弱电子系统进行协调优化
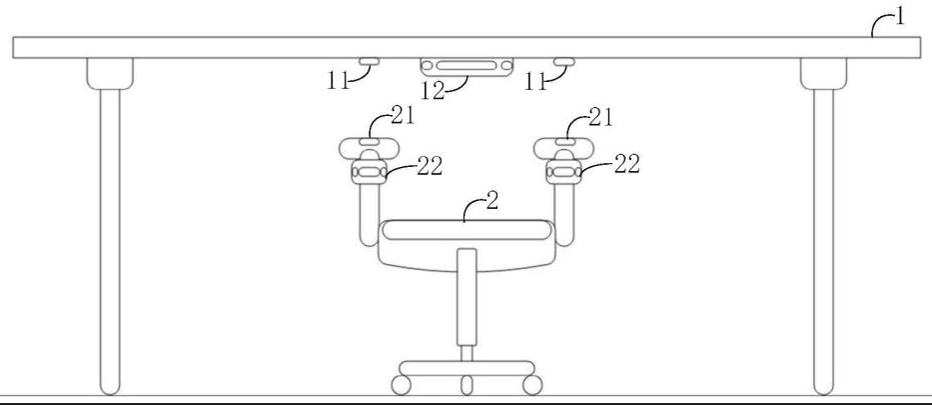
智能椅自动对位充电方法,智能椅包括可充电电源、电能接收单元、用于定位电能接收单元的第一定位器、用于使智能椅行进和转向的运动单元,方法包括:通过第一定位器与充电设备上用于定位电能输出单元的第二定位器进行交互,从而确定第一定位器相对于第二定位器的方位数据;根据方位数据计算转向角度;通过运动单元按照转向角度使智能椅旋转至第一行进方向;通过运动单元以第一行进方向行进,并在行进过程中通过第一定位器与第二定位器进行交互,从而在行进至第一目标位置;通过运动单元按照预设角度使智能椅旋转至第二方向;通过运动单元以第二方向,从而在行进到第二目标位置后停止,使得电能输出单元能够对准电能接收单元进行充电。

一种可进行太阳能跟踪的无人机,包括无人机机身、主旋转电机、固定座、光敏感应器、翻转式太阳能电池板、电池板固定框、侧旋转电机、固定架、升降气缸和机翼,无人机机身上有主旋转电机,固定座固定在主旋转电机的转轴上,翻转式太阳能电池板成排固定在电池板固定框内,电池板固定框两侧有侧旋转电机,侧旋转电机的转轴固定在电池板固定框侧端中部,电池板固定框两侧的固定架下方有升降气缸,升降气缸固定在固定座上,固定座上有4个光敏感应器。本发明无人机顶部太阳能跟踪机构的翻转式太阳能电池板成排设置可同时进行翻转,而水平面旋转则由主旋转电机进行控制,从而能最大限度的对太阳能进行收集,并且成本更为低廉,安装更为方便。

本发明提出一种无人机的可视导航系统。其中,无人机集群的协作交互方法包括以下步骤:无人机集群中的某个无人机确定其通信覆盖范围内满足协作条件的无人机,并根据满足协作条件的无人机建立无人机协作组;确定所述无人机协作组中的多架无人机的机间路由;根据所述机间路由的链路状态信息对所述无人机协作组中的多架无人机分配协作任务;根据所述无人机协作组中的多架无人机的运动状态评估所述链路状态,并根据评估结果更新所述无人机协作组的无人机及每架无人机的协作任务。本发明可靠性强,通信质量高,能较好地适应可视导航中的无人机集群通信环境。



