
用于碳钢的四元复配气相缓蚀剂,由质量-体积浓度为0.8g/L~1.2g/L硅酸钠,1.8g/L~2.3g/L丙氨酸,6.8g/L~8.3g/L苯甲酸钠,6.9g/L~8.1g/L尿素溶于蒸馏水组成;上述缓蚀剂的制备方法为:按质量-体积浓度分别称取所需的硅酸钠、丙氨酸、苯甲酸钠和尿素,分别用1/4体积的蒸馏水溶解,搅拌均匀;将得到的四种溶液分别静置后混合并搅拌均匀。本发明四元复配缓蚀剂使用硅酸钠、丙氨酸、苯甲酸钠和尿素进行复配,绿色、环保、高效、对环境污染小,且具有良好的协同作用,解决了现有气相缓蚀剂缓蚀性能差、污染大的问题,制备方法简单,使用方便,能够提高碳钢的缓蚀率,延长碳钢的使用寿命。
微旷科技(苏州)有限公司在江苏省产业技术研究院、长三角先进材料研究院的支持下于2023年1月成立,专注高分辨X射线三维成像设备(micro CT)的开发、生产、销售。团队经过多年科技部重点研发前沿大科学装置和基金委重大仪器专项的成果积累,近两年从硬件设计、机械结构、运动控制、数据采集和三维重构算法、缺陷识别软件等全方面实现全链条自主研发。目前已经成熟开发了多款微焦点高精度X射线显微镜和大功率工业CT。成像质量、扫描速度和重构效率均不逊色千万级进口X射线显微镜。同时,微旷科技研发设备最大特色是配置了全世界领先的多场景原位装置,比如最高2200度的高温CT,20kN的大载荷变形CT,粉末烧结CT,应力腐蚀CT等。
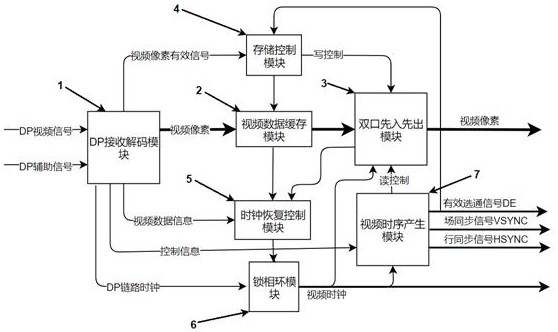
本发明公开了一种DP视频信号时序恢复装置及其工作方法。该装置包括DP接收解码模块、视频数据缓存模块、双口先入先出模块、存储控制模块、时钟恢复控制模块、锁相环模块和视频时序产生模块。本发明通过DP接收解码模块解析出DP视频信号的控制信息,并根据VSW、VSS参数的配置,能够将FreeSync模式下的DP视频信号转换为完整的Timing信息输出,可以方便的实现将其转换为其它视频信号;实现在FreeSync模式可变帧频率情况下,保持VSync_Width和VSync_Start数值一致;降低电路成本,并使得视频时序转换延迟降低;可保证输出视频信号的Timing信息的完整性和实时性。
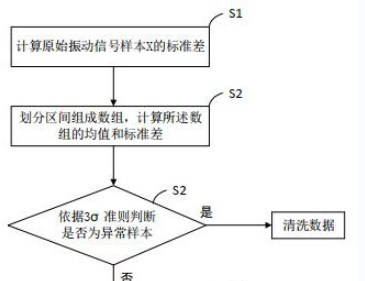
本发明提供一种基于区间标准差结合频谱分析的振动数据清洗方法,计算原始振动信号样本X的标准差划分区间组成数组,计算数组均值和标准差,依据3σ准则判断原始振动信号样本X是否为异常样本,若为异常样本则进行清洗,若为正常样本则将原始振动信号样本X分为两组,分别转换为频谱;将频谱进行平滑消除噪声影响;对频谱进行相关分析得到相关系数,如果相关系数小于阈值,则原始振动信号样本X为异常样本,清洗;如果相关系数大于或等于阈值,则原始振动信号样本X为正常样本,保留。本发明通过计算比较原始振动信号每个子区域样本标准差,结合相邻两个区间快速傅里叶变换频谱相关性分析对异常信号在线识别,降低异常信号对后续故障诊断的干扰。
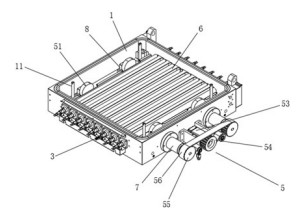
本实用新型公开一种用于芯片焊接的快速冷却的真空共晶炉,包括下壳体、上壳体、多个加热装置、载台和驱动机构,所述下壳体上设置有多个冷却凸台,所述冷却凸台内设置有冷却介质通道;所述上壳体和所述下壳体相连接,所述上壳体和所述下壳体之间形成空腔;所述加热装置和所述冷却凸台逐一间隔设置;所述载台设置在所述空腔内;所述驱动机构和所述载台传动连接,以驱动所述载台脱离或接触所述冷却凸台。本申请的真空共晶炉中的载台可脱离或接触冷却凸台,加热时载台升起脱离冷却凸台,加热迅速,且不会受冷却管道的影响,使得受热均匀。加热后需要快速进行冷却,就将载台下降与冷却凸台贴合,降温速度快。
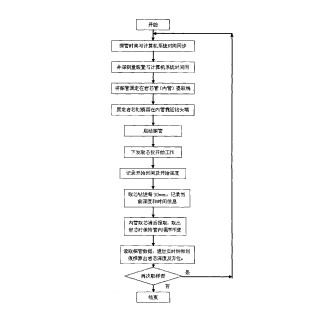
本发明公开了一种多点岩芯定向取芯系统及方法,包括:绳索取芯部分,井下定向仪、探管定向单元、PC机及配套软件、打印机、地面绞车和深度测量系统组成。本发明还公开一种多点岩芯定向取芯方法,包括:通过岩芯定向仪的实时时钟及井深装置的实时时钟,确定相同时刻岩芯的位置及其相对于磁北的方位的对应关系,因而能够正确推算出整个取芯管内岩芯的方位。

一种农业用智能定时喷药器,属于病虫害防治领域,其组成结构包括:供电系统、控制系统、动力系统、储药系统、雾化系统;其特征在于:所述控制系统由光敏电阻和延时电路器件组成,可控制喷药次数、喷药时间以及喷药量。本发明具有结构简单、能耗小、工作稳定性强的优点,可实现农业病虫害防治的智能喷药、精准喷药,其喷药的持续时间精度高,单次喷药量的误差小,可显著提高害虫防治的效率,降低害虫防治的人力成本,满足田间农业病虫害防治的需求。
本发明提供一种遥操作机器人基于视觉的动觉示教控制方法,其步骤包括采用立体视觉技术对现场的作业对象及背景环境(障碍物)进行识别与空间信息提取;以通过视觉识别、计算出的作业对象与机器人末端间的位姿关系为参数,构建作业对象对机器人的虚拟吸引力;以机器人末端沿其速度方向与背景环境(障碍物)的距离为参数,构建机器人所受的障碍物排斥力;将作业对象虚拟吸引力、障碍物虚拟斥力以及机器人抓取物体时的真实作用力合成机器人示教力;通过主端系统与从端系统间的雅可比矩阵,将示教力向操作手柄反馈,从而实现对操作者的动觉示教。本发明相对于现有技术具有如下的优点及技术效果 :[0031] 1. 将机器智能与人类高级决策的优点有机集成,可有效提高机器人的作业效率与局部自主。[0032] 2. 降低对操作人员熟练程度的要求。[0033] 3. 对可能发生的机器人与环境间的碰撞进行预测,可有效保证机器人作业系统的安全性。[0034] 4. 能够缓解操作者控制机器人时的心理紧张及决策疲劳。[0035] 5. 控制回路具有数据量小、信息丰富、超前预测的优点,可有效避免图像时滞导致的机器人操控盲目性。一种遥操纵机器人基于视觉的动觉示教控制方法,其特征在于,包括以下步骤 :[0007] S1、采用立体视觉技术对现场的作业对象及背景环境 ( 障碍物 ) 进行识别与空间信息提取;[0008] S2、以步骤 S1 中获取的作业对象与机器人末端间的位姿关系为参数,构建作业对象对机器人的虚拟吸引力;[0009] S3、以步骤 S1 中获取的机器人末端沿其速度方向与背景环境 ( 障碍物 ) 的距离为参数,构建机器人所受的障碍物排斥力;[0010] S4、将作业对象虚拟吸引力、障碍物虚拟斥力以及机器人抓取物体时的真实作用力合成机器人示教力;[0011] S5、通过主端系统与从端系统间的雅可比矩阵,将示教力向操作手柄反馈,从而实现对操作者的动觉示教。[0012] 根据权利要求 1 所述的遥操纵机器人基于视觉的动觉示教控制方法,其特征在于,所述步骤 S1 包括 :包括以下步骤 :[0013] S11.1、将 Bumblebee 双目摄像头采用 eye-to-hand 方式固定在现场环境正上方,光轴与地面垂直,简称为环境相机;[0014] S11.2、根据环境相机图像中各像素点的颜色、灰度或纹理特征,从中剔除机器人区域及作业对象区域,以获得背景图像;[0015] S11.3、根据图像匹配及摄像机标定的结果,实时计算背景图像中各像素点的空间坐标;[0016] S11.4、采用基于空间自相关性的内插方式来预测估计所剔除的机器人区域及作业对象区域应有像素属性,并结合背景图像像素特征,生成背景环境的高程数据模型;[0017] S12.1、将 Kinect 相机采用 eye-in-hand 方式固连于机器人末端,简称为手部相机;[0018] S12.2、根据手部相机图像中各像素点的颜色、纹理特征,采用结合人口统计与区域增长的图像分割方法来提取作业对象区域,并采用分裂 - 合并算法提取该区域轮廓的近似多边形,取多边形的顶点为作业对象图像特征;[0019] S12.3、根据图像匹配及摄像机标定的结果,实时计算作业对象区域各像素点的空间坐标,并构建其 OBB(Oriented Bounding Box- 有向包围盒 ) 包围盒模型。



