
本发明是一种基于链路代价转换的卫星负载平衡方法,该方法是在卫星虚拟拓扑策略的基础上,对拓扑快照进行LEO(低轨)层链路代价转换和分层分流。因此,利用卫星星座运行的可预测性和周期性,将系统运行时间划分为若干个相同的时间段,并在每个时间段个分n个间隙tp,每个时隙内对星间链路进行链路过载判断。对全球覆盖区域进行拥塞等级划分,配合LEO卫星链路实时流量,在链路拥塞时进行代价调整和路径优化,平衡整个网络的流量。并在此基础上配合MEO层卫星网络,对不同服务质量(QoS)的传输业务进行合理的路径选择,在满足高优先级业务时延的同时,提高整网的吞吐量。
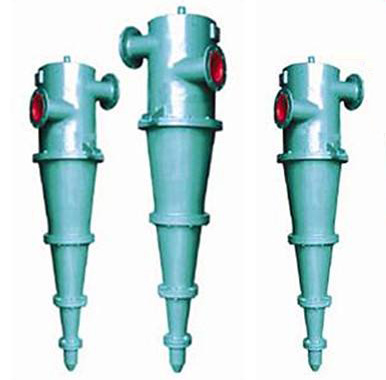
本发明公开了一种基于注入溶气水式纸浆净化原理的锥形除渣器系统及浆渣分离方法,是将需净化的浆料在进入锥形除渣器前,在进浆管道中先加入一定比例的过饱和溶气水,当溶气水与浆液在管道中混匀后,微溶气-浆液体系的比重迅速下降,而杂质比重保持不变,也就是说迅速增加了微溶气浆液与重杂质间的比重差;当微溶气浆液进入锥形除渣器系统后,受旋转场的作用使得浆液与杂质间的离心力差变大,分离动力更大;而且良浆出口压力比进浆口压力低,浆液中空气开始适当膨胀,比重更轻,更有利于良浆从中心管孔中排出,分离效率更高。
本发明提供一种遥操作机器人基于视觉的动觉示教控制方法,其步骤包括采用立体视觉技术对现场的作业对象及背景环境(障碍物)进行识别与空间信息提取;以通过视觉识别、计算出的作业对象与机器人末端间的位姿关系为参数,构建作业对象对机器人的虚拟吸引力;以机器人末端沿其速度方向与背景环境(障碍物)的距离为参数,构建机器人所受的障碍物排斥力;将作业对象虚拟吸引力、障碍物虚拟斥力以及机器人抓取物体时的真实作用力合成机器人示教力;通过主端系统与从端系统间的雅可比矩阵,将示教力向操作手柄反馈,从而实现对操作者的动觉示教。本发明相对于现有技术具有如下的优点及技术效果 :[0031] 1. 将机器智能与人类高级决策的优点有机集成,可有效提高机器人的作业效率与局部自主。[0032] 2. 降低对操作人员熟练程度的要求。[0033] 3. 对可能发生的机器人与环境间的碰撞进行预测,可有效保证机器人作业系统的安全性。[0034] 4. 能够缓解操作者控制机器人时的心理紧张及决策疲劳。[0035] 5. 控制回路具有数据量小、信息丰富、超前预测的优点,可有效避免图像时滞导致的机器人操控盲目性。一种遥操纵机器人基于视觉的动觉示教控制方法,其特征在于,包括以下步骤 :[0007] S1、采用立体视觉技术对现场的作业对象及背景环境 ( 障碍物 ) 进行识别与空间信息提取;[0008] S2、以步骤 S1 中获取的作业对象与机器人末端间的位姿关系为参数,构建作业对象对机器人的虚拟吸引力;[0009] S3、以步骤 S1 中获取的机器人末端沿其速度方向与背景环境 ( 障碍物 ) 的距离为参数,构建机器人所受的障碍物排斥力;[0010] S4、将作业对象虚拟吸引力、障碍物虚拟斥力以及机器人抓取物体时的真实作用力合成机器人示教力;[0011] S5、通过主端系统与从端系统间的雅可比矩阵,将示教力向操作手柄反馈,从而实现对操作者的动觉示教。[0012] 根据权利要求 1 所述的遥操纵机器人基于视觉的动觉示教控制方法,其特征在于,所述步骤 S1 包括 :包括以下步骤 :[0013] S11.1、将 Bumblebee 双目摄像头采用 eye-to-hand 方式固定在现场环境正上方,光轴与地面垂直,简称为环境相机;[0014] S11.2、根据环境相机图像中各像素点的颜色、灰度或纹理特征,从中剔除机器人区域及作业对象区域,以获得背景图像;[0015] S11.3、根据图像匹配及摄像机标定的结果,实时计算背景图像中各像素点的空间坐标;[0016] S11.4、采用基于空间自相关性的内插方式来预测估计所剔除的机器人区域及作业对象区域应有像素属性,并结合背景图像像素特征,生成背景环境的高程数据模型;[0017] S12.1、将 Kinect 相机采用 eye-in-hand 方式固连于机器人末端,简称为手部相机;[0018] S12.2、根据手部相机图像中各像素点的颜色、纹理特征,采用结合人口统计与区域增长的图像分割方法来提取作业对象区域,并采用分裂 - 合并算法提取该区域轮廓的近似多边形,取多边形的顶点为作业对象图像特征;[0019] S12.3、根据图像匹配及摄像机标定的结果,实时计算作业对象区域各像素点的空间坐标,并构建其 OBB(Oriented Bounding Box- 有向包围盒 ) 包围盒模型。

本发明涉及一种浮油回收装置,其包括吸油器、泵、油水分离器,吸油器包括浮油箱、斜挡板、底板、吸油盘、吸油管,以及控制系统,浮油箱内设置隔板;隔板顶部与侧部均与浮油箱箱体相接,底端与浮油箱箱体底部之间设置供油液进入的通道口,通道口低于斜挡板之顶端,斜挡板顶端低于吸油盘吸口;在浮油箱上部设置真空箱及真空泵,真空箱与斜挡板分置在隔板的两侧,真空箱与浮油箱相通。这种结构,在真空的作用下,吸油盘所在腔体内的回油液面高于斜挡板一侧的液面,并可通过真空度,可控制回油液面与吸油盘吸口的高度差,使高度差保持在一定范围内,从而让吸油盘吸口始终没入回油液面的下方,有效防止空气的吸入,防止降低回油效率。

本发明公开了分离富集外周血中造血干细胞(hematopoietic?stem?cell,HSC)的方法,更好地为造血干细胞进行后续研究提供基础,涉及生物医学领域。方法包括树状超支聚合物与鼠抗人造血干细胞单克隆抗体共价偶联、鼠抗人造血干细胞单克隆抗体修饰的树状超支聚合物再包被长链生物素分子、鼠抗人造血干细胞单克隆抗体和长链生物素共修饰的树状超支聚合物捕获外周血样品中的造血干细胞、链霉亲和素修饰的纳米磁珠识别并偶联外周血中长链生物素化树状超支聚合物、被捕获造血干细胞的分离及重悬等步骤。重悬液可以直接进行后续分析,与传统的细胞分离方法相比,该方法更适用于在复杂外周血样品中对造血干细胞进行磁分离,提高了外周血样品中造血干细胞分离效率。
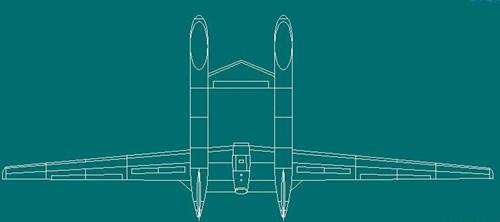
本发明提出了一种安装马格纳斯效应推进系统的高空无人机,采用双机身布局,两个机身外侧安装机翼,两个机身之间安装有马格纳斯效应推进系统和尾翼,机身头部安装有螺旋桨推进器;机翼上表面覆盖有薄膜太阳能电池。其中马格纳斯效应转子在白天可作为升力装置,在相同来流速度下,马格纳斯效应转子只需要提高转速则可大幅提高升力,即使在低速飞行时也可为无人机提供足够升力,降低无人机最小起飞速度和巡航速度,有利于无人机进行短距起降和空中低速巡航侦查;夜间,马格纳斯效应转子可作为风力发电装置,利用高空的稳定、持续的风能进行发电,避免了无人机仅能在白天获取能量密度较低的太阳能为飞行储能、从而使得机翼面积或翼展很大的不足。
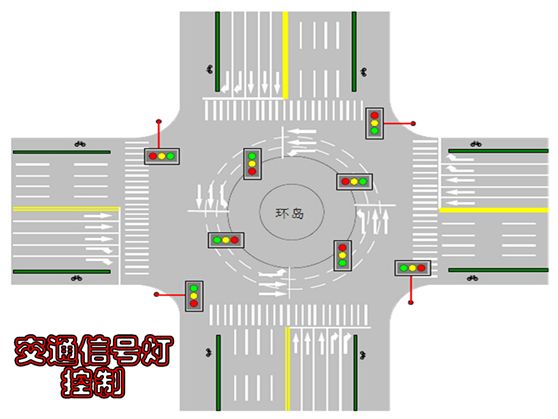
本发明公开了一种独立式自适应交通信号控制系统及其实现方法,解决现有道路交通拥堵的问题。本发明包括第一信息采集器,第二信息采集器,以及与第一信息采集器和第二信息采集器相连并用于控制交通信号灯的交通信号控制器;其中,第一信息采集器采集车道上静止车辆情况并将信息传送至交通信号控制器;第二信息采集器采集人行道需要通行行人的情况并将信息传送至交通信号控制器。本发明通过保证每一交通路口均能根据实际交通流量优化交通信号控制,使每一路口的交通通行达到最优,提高每一路口的交通通行率,从而保障整个城市交通的顺畅,减少交通拥堵,节省时间成本,实现节能减排。

本发明涉及一种枯草芽孢杆菌抗菌脂肽的生产方法及其在仔猪饲料中的应用,属于饲料添加剂和生物技术领域。枯草芽孢杆菌(Bacillussubtilis)fmbJ种子培养基扩大培养后,2~5%接种,28~35℃,5000L发酵罐液体深层发酵30~48h,然后提取,喷雾干燥生产抗菌脂肽产品。这种抗菌脂肽按照4000IU/kg添加至仔猪基础日料中,提高了饲料利用率,并对促进仔猪生长发育、预防仔猪腹泻和提高仔猪免疫力均有较好的效果。本发明菌株枯草芽孢杆菌为安全的微生物,其抗菌产物安全性高。另外与目前仔猪饲料中使用的黄霉素相比,具有更好的效果,对取代饲料抗生素添加和保障食品安全具有重要意义。本发明的主要优点和积极效果如下 :1. 本发明首次将枯草芽孢杆菌抗菌脂肽用于仔猪饲料中,可以显著减少仔猪的腹泻率,提高仔猪的饲料利用率,并通过提高三碘甲状腺氨酸 (T3) 和降低甲状腺素 (T4) 水平而提高机体免疫力。添加抗菌脂肽对仔猪的生长发育和免疫机能具有较好的调节和促进作用,提高鸡的饲料利用率和免疫功能有积极的意义。[0008] 2. 本发明与目前仔猪饲料中使用的黄霉素相比,具有更好的促进生产和调节免疫的效果,对取代饲料抗生素添加和保障食品的安全具有重要意义。选用 28 日龄断奶的长 × 大二元杂交健康仔猪 360 头,根据公母各半、来源不同的原则随机分为 4 个处理组,每处理设 6 重复,每重复 15 头,各重复仔猪体重相近(P>0.05)。基础日粮选用玉米 - 豆粕型,营养需要参照 NRC (1998)《猪的营养需要》回肠表观可消化氨基酸模式,日粮组成和营养成分。处理组分别为空白对照组(C 组)饲喂基础日粮(基础日粮中不含抗生素和抗菌脂肽),抗生素对照组(AC)在基础日粮中添加 5 mg/kg 的黄霉素,试验 在基础日粮中添加枯草芽孢杆菌 fmbJ 抗菌脂肽 2000 IU/kg,预试期为 3 天,试验期为 28 天。[0014] 添加 2000 IU/kg 的 组 28 天的平均体重较 C 组提高 3.76% ;I 组的平均体重日增量较 C 组增加 8.27%,增加显著,较 AC 组增加 1.7%,但不显著 ;I 组的料重比 F/G 较 AC 组降低 4.14%,较 C 组也降低 2.87%。1~14 天,I 组的肠道大肠杆菌数量,较 C 组降低 2 个数量级,较 AC 组减少 1 个数量级,降低显著,但是乳酸杆菌的数量较 C 组降低了 1 个数量级(P>0.05),与 AC 组大致相当 ;1~14 天的腹泻率较 C 组降低 29.5%,和 AC 组相同(P<0.05)。显著降低了 1~14 天的仔猪腹泻率。[0015] 添加 2000 IU/kg 抗菌脂肽能显著提高血清三碘甲状腺氨酸 T3 水平,降低甲状腺素 T4 水平。 I 组的三碘甲状腺氨酸 T3 水平较 AC 组提高 61.61%(P<0.01),较 C 组也提高 37.12%(P<0.05);I 组的甲状腺素 T4 水平较 C 组和 AC 组分别降低 14.21%(P<0.05)和19.61%(P<0.05)。胰岛素水平 I 组较 C 组也升高 17.63%(P<0.05)。但是抗菌脂肽对仔猪血清生长激素和皮质醇水平无显著影响。[0016] 甘油三酯(TG)和低密度脂蛋白胆固醇(LDL-C)水平 C 组、AC 组和 I 组均无显著差异。但 I 组的 TG 水平较 C 组和 AC 组有升高趋势,LDL-C 水平较 C 组和 AC 组也有降低趋势。I 组高密度脂蛋白胆固醇(HDL-C)水平较 C 组和 AC 组也有升高趋势。I 组的高低密度脂蛋白胆固醇之比(H/L)较 C 组分别升高 31.43%(P<0.05)。I 组总胆固醇(TC)水平较 C组也降低 19.31%(P<0.05)。表明抗菌脂肽对断奶仔猪脂肪代谢有一定作用。血清总蛋白TP 方面,I 组较 C 组和 AC 组也有升高趋势,但差异不显著。各组尿素氮(UN)无显著差异且无明显变化趋势。



