
本发明可见信息相互感应交流无线互联网,为解决现有网络交友、找合作、找买卖等,存有虚假信息、危害社会信用体系的嫌疑及风险等弊端。为此,本发明提出,在人们随身的无线电设备,如无线手机、无线手环、移动电脑等为载体,装入本发明的主程序系统1、注册登录模块2、定位搜索模块3、信息发送模块4、信息接受模块5、信息交流界面6、拍照影音模块7,好友社区模块8、N个功能模块9、数据交流通道10等功能模块组成无线互联网即时通信息交流工具,定位确认实现当事人先在真实、现实的可见范围内进行无线感应信息交流,加为好友后远、近距离都可进行信息交流,以此来降低、节制虚假信息的风险,有助提高网络信息真实度、社会诚信度。

双输出传动箱是双螺杆挤出机中的关键装置,它广泛用于制备化工、食品、甚至建 筑材料制砖等工业生产领域。近几十年用于制备塑料、化纤、碳纤维和食品加工的双螺杆挤出机都配备的是来自德国THYSSEN HENSCHEL和意大利 Zambello 的大功率双输出传动箱,这些高端设备曾经是国内同类产品无法替代的。
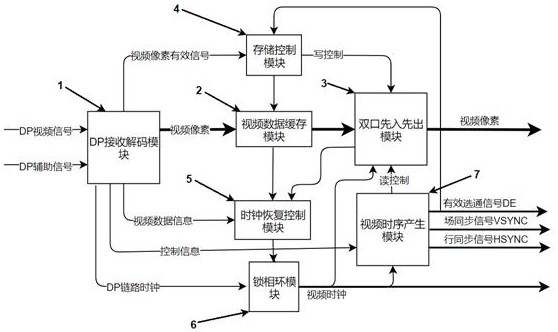
本发明公开了一种DP视频信号时序恢复装置及其工作方法。该装置包括DP接收解码模块、视频数据缓存模块、双口先入先出模块、存储控制模块、时钟恢复控制模块、锁相环模块和视频时序产生模块。本发明通过DP接收解码模块解析出DP视频信号的控制信息,并根据VSW、VSS参数的配置,能够将FreeSync模式下的DP视频信号转换为完整的Timing信息输出,可以方便的实现将其转换为其它视频信号;实现在FreeSync模式可变帧频率情况下,保持VSync_Width和VSync_Start数值一致;降低电路成本,并使得视频时序转换延迟降低;可保证输出视频信号的Timing信息的完整性和实时性。
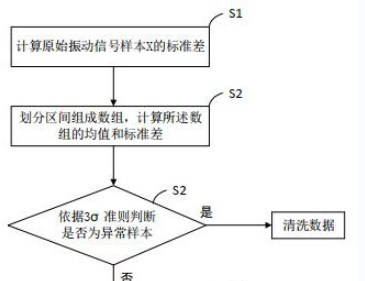
本发明提供一种基于区间标准差结合频谱分析的振动数据清洗方法,计算原始振动信号样本X的标准差划分区间组成数组,计算数组均值和标准差,依据3σ准则判断原始振动信号样本X是否为异常样本,若为异常样本则进行清洗,若为正常样本则将原始振动信号样本X分为两组,分别转换为频谱;将频谱进行平滑消除噪声影响;对频谱进行相关分析得到相关系数,如果相关系数小于阈值,则原始振动信号样本X为异常样本,清洗;如果相关系数大于或等于阈值,则原始振动信号样本X为正常样本,保留。本发明通过计算比较原始振动信号每个子区域样本标准差,结合相邻两个区间快速傅里叶变换频谱相关性分析对异常信号在线识别,降低异常信号对后续故障诊断的干扰。
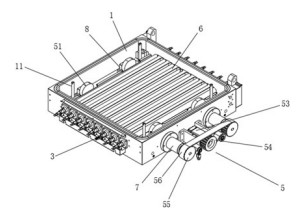
本实用新型公开一种用于芯片焊接的快速冷却的真空共晶炉,包括下壳体、上壳体、多个加热装置、载台和驱动机构,所述下壳体上设置有多个冷却凸台,所述冷却凸台内设置有冷却介质通道;所述上壳体和所述下壳体相连接,所述上壳体和所述下壳体之间形成空腔;所述加热装置和所述冷却凸台逐一间隔设置;所述载台设置在所述空腔内;所述驱动机构和所述载台传动连接,以驱动所述载台脱离或接触所述冷却凸台。本申请的真空共晶炉中的载台可脱离或接触冷却凸台,加热时载台升起脱离冷却凸台,加热迅速,且不会受冷却管道的影响,使得受热均匀。加热后需要快速进行冷却,就将载台下降与冷却凸台贴合,降温速度快。
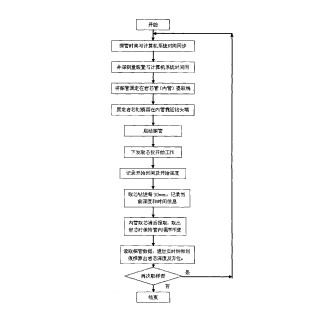
本发明公开了一种多点岩芯定向取芯系统及方法,包括:绳索取芯部分,井下定向仪、探管定向单元、PC机及配套软件、打印机、地面绞车和深度测量系统组成。本发明还公开一种多点岩芯定向取芯方法,包括:通过岩芯定向仪的实时时钟及井深装置的实时时钟,确定相同时刻岩芯的位置及其相对于磁北的方位的对应关系,因而能够正确推算出整个取芯管内岩芯的方位。
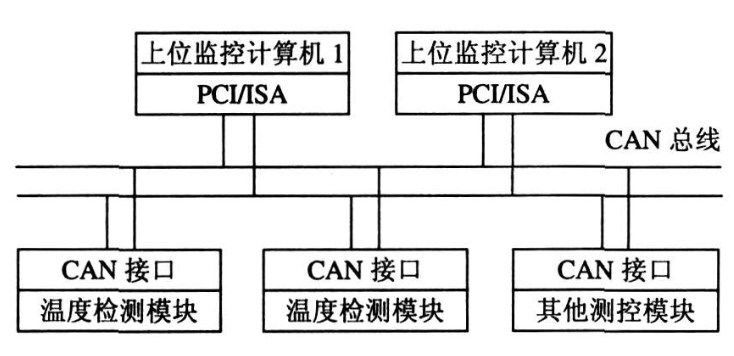
使用CAN总线通信方式,通过CAN总线芯片JTA1050,将三块单片机进行并联,单片机1作为温度检测,单片机2作为主控,单片机3作为电机控制。温度检测模块使用DS18b20传感器进行测温,返回温度值,由单片机1读取;再通过CAN总线方式传送给单片机2主控模块,通过PID智能控制算法,将温度值推算出合理速度值之后,通过OLED显示当前温度值和速度值,并将速度值通过CAN总线方式传送给单片机3电机控制模块,从而调节风速,进而实现智能温度控制。
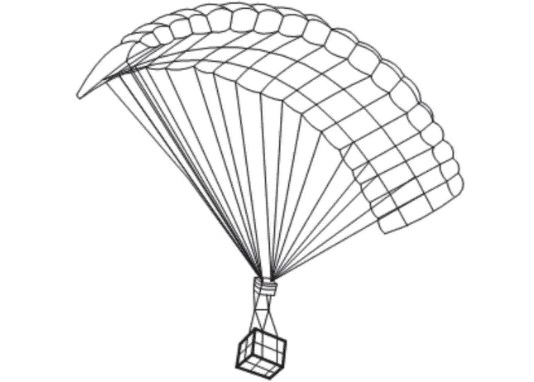
冲压式翼伞是一种由纺织材料构成的柔性飞行器,开伞后空气由翼伞前缘切口进入气室,在气室内形成滞止压力,使翼伞能保持较为稳定的翼形并产生升力和阻力,因此翼伞具有较高升阻比、优良的滑翔性能和可控性。拉拽伞衣后缘可以调整翼伞飞行方向和速度,实现精确着陆,克服了传统圆形降落伞飞行轨迹随风飘、落点散布大的缺点,同时翼伞在着陆时可以以雀降方式无损着陆,在战场物资精确空投、自然灾害救灾物资精确空投、航天器回收等领域有广泛应用前景,得到了国内外许多研究者的关注。为翼伞系统规划出能避开静态障碍物的归航航迹是能否实现精确空投的前提之一,很大程度上决定了翼伞的着陆精度和归航控制方式,只有在合适的规划航迹的基础上才能设计合适的航迹跟踪控制器,因此避障航迹规划对实现翼伞精确空投具有重要意义。



