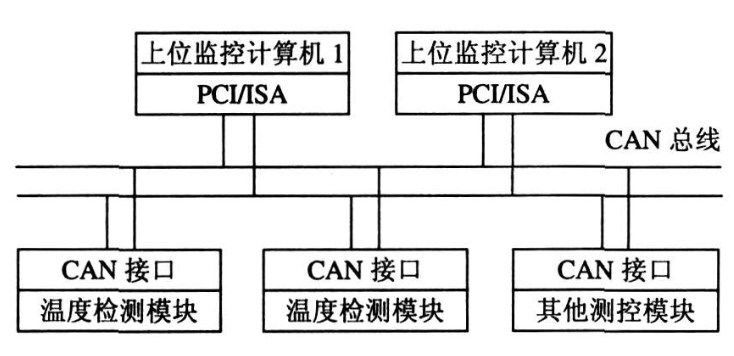
使用CAN总线通信方式,通过CAN总线芯片JTA1050,将三块单片机进行并联,单片机1作为温度检测,单片机2作为主控,单片机3作为电机控制。温度检测模块使用DS18b20传感器进行测温,返回温度值,由单片机1读取;再通过CAN总线方式传送给单片机2主控模块,通过PID智能控制算法,将温度值推算出合理速度值之后,通过OLED显示当前温度值和速度值,并将速度值通过CAN总线方式传送给单片机3电机控制模块,从而调节风速,进而实现智能温度控制。
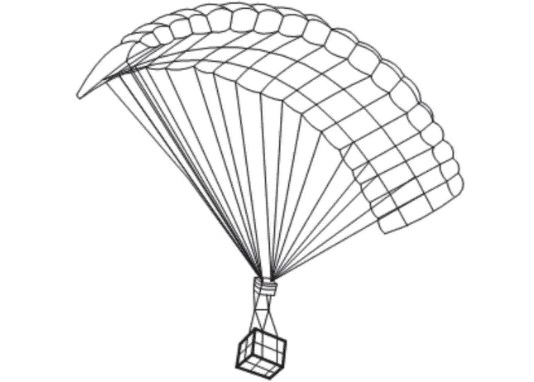
冲压式翼伞是一种由纺织材料构成的柔性飞行器,开伞后空气由翼伞前缘切口进入气室,在气室内形成滞止压力,使翼伞能保持较为稳定的翼形并产生升力和阻力,因此翼伞具有较高升阻比、优良的滑翔性能和可控性。拉拽伞衣后缘可以调整翼伞飞行方向和速度,实现精确着陆,克服了传统圆形降落伞飞行轨迹随风飘、落点散布大的缺点,同时翼伞在着陆时可以以雀降方式无损着陆,在战场物资精确空投、自然灾害救灾物资精确空投、航天器回收等领域有广泛应用前景,得到了国内外许多研究者的关注。为翼伞系统规划出能避开静态障碍物的归航航迹是能否实现精确空投的前提之一,很大程度上决定了翼伞的着陆精度和归航控制方式,只有在合适的规划航迹的基础上才能设计合适的航迹跟踪控制器,因此避障航迹规划对实现翼伞精确空投具有重要意义。



