
本发明可见信息相互感应交流无线互联网,为解决现有网络交友、找合作、找买卖等,存有虚假信息、危害社会信用体系的嫌疑及风险等弊端。为此,本发明提出,在人们随身的无线电设备,如无线手机、无线手环、移动电脑等为载体,装入本发明的主程序系统1、注册登录模块2、定位搜索模块3、信息发送模块4、信息接受模块5、信息交流界面6、拍照影音模块7,好友社区模块8、N个功能模块9、数据交流通道10等功能模块组成无线互联网即时通信息交流工具,定位确认实现当事人先在真实、现实的可见范围内进行无线感应信息交流,加为好友后远、近距离都可进行信息交流,以此来降低、节制虚假信息的风险,有助提高网络信息真实度、社会诚信度。

本发明公开了一种防治高血脂症药物口服片剂及其制备工艺。该口服片剂由1重量份阿司匹林丁香酚酯作为原料药,以0.1-0.15重量份崩解剂、0.06-0.1重量份表面活性剂、0.5-0.6重量份粘合剂和0.03重量份润滑剂作为辅料压片制成阿司匹林丁香酚酯口服片剂,每片重0.265±0.005g。该制剂可迅速崩解溶出,具有和分散均匀的优点其各方面理化性质符合2010版中国药典规定,服用方便;药理学实验表明该口服片剂可防治高血脂症疾病。
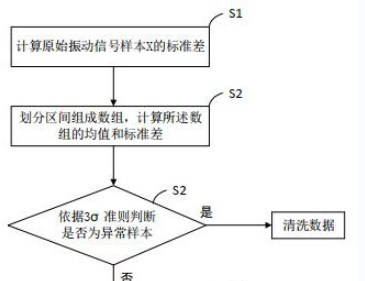
本发明提供一种基于区间标准差结合频谱分析的振动数据清洗方法,计算原始振动信号样本X的标准差划分区间组成数组,计算数组均值和标准差,依据3σ准则判断原始振动信号样本X是否为异常样本,若为异常样本则进行清洗,若为正常样本则将原始振动信号样本X分为两组,分别转换为频谱;将频谱进行平滑消除噪声影响;对频谱进行相关分析得到相关系数,如果相关系数小于阈值,则原始振动信号样本X为异常样本,清洗;如果相关系数大于或等于阈值,则原始振动信号样本X为正常样本,保留。本发明通过计算比较原始振动信号每个子区域样本标准差,结合相邻两个区间快速傅里叶变换频谱相关性分析对异常信号在线识别,降低异常信号对后续故障诊断的干扰。
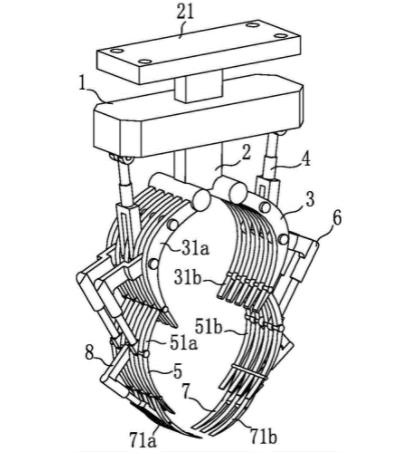
本发明涉及抓斗,具体的说是一种物体大小自适应式抓斗,包括顶板、拉杆,一级抓斗、一级液压杆、二级抓斗、二级液压杆、三级抓斗和三级液压杆;一级抓斗尾部铰接在拉杆上;二级抓斗尾部铰接在一级抓斗尾部的横杆上;二级液压杆一端铰接在一级抓斗上,另一端铰接在二级抓斗中部的横杆上,二级液压杆用于带动二级抓斗做开合运动;三级抓斗尾部铰接在二级抓斗尾部的横杆上;三级液压杆一端铰接在二级抓斗上,另一端铰接在三级抓斗中部的横杆上;本发明在抓取较小直径的物体时可以使用一级抓斗,而在抓取较大直径的物体时可以将二级、三级抓斗和一级抓斗配合使用,可以有效提升抓斗对所抓取物体尺寸的适用性。

本发明的遥控水冷耐高温消防车不怕火烧,不怕有毒有害气体或物质,可以长时间在火海里工作,大大提高了灭火和救援效果,而且还能检测现场有毒气体数据发给指挥部有利指挥,车内外网络摄像头及时将车内外场景传输给指挥部进行遥控操作,保证消防人员安全。(惨痛教训:天津港爆炸事故共发现遇难公安消防人员23人,天津港消防人员73人,民警11人,其他人员55人。1·2哈尔滨仓库火灾事故 ,火灾共造成5名消防战士牺牲,14人受伤)。小型遥控水冷耐高温灭火消防车:1.2米×1.0米×1.0米。(科技成果评价)大型遥控水冷耐高温灭火救援车:2.5米×1.3米×2.0米,车上可以载灭火器材、氧气瓶及救护设备,可以载人,用于灭火和救护伤员。本发明属国内外首创,享有优先权还可以申请国际专利。遥控水冷耐高温消防车由水冷车厢体和车底盘组成,有遥控水冷耐高温轮式车底盘和遥控水冷耐高温履带车底盘;水冷车厢体是由空心板连接组成,各空心板中通入冷却水;水冷车厢体上安装有平台孔保护套架、遥控水枪电动转动云台、高压水炮(可喷水或泡沫),前面安装有设备水冷箱,里面安装有水冷观察窗、网络防水摄像头和防水前车灯;水冷车厢体上还安装有车外水冷网络摄像头、车内网络摄像头、有毒气体检测仪、遥控接收机、遥控方向盘、遥控电机驱动器、动力电机、电磁刹车器、由带充电器电源和防水电线消防水带及其防水电线供电;水冷系统还有 总进水管、止回阀 、减压阀、电磁阀、总水管三通、主水管消防水带接头、(科技成果评价)水冷车大樑、水冷车轮、冷确水槽、喷水管、水冷行走支架、水冷驱动轮、水冷引导轮、水冷托带轮、水冷支重轮等。可以喷水、喷泡沫、喷干粉等灭火剂。有小型遥控水冷耐高温灭火消防车和大型的遥控水冷耐高温消防救援车,主要结构原理相同。设计合理、结构简单、安全可靠、操作方便、成本低廉,容易生产。
基于快速电流感应的单光子探测抑制电路,包括雪崩光电二极管,雪崩光电二极管通过电流源感应模块与输出端连接,雪崩光电二极管与电流源感应模块的连接点通过复位开关与输出端连接,电流源感应模块通过抑制开关与复位开关连接;雪崩光电二极管上所加的电压为雪崩电压VB与额外电压VEX之和,当光子到达时APD快速雪崩产生雪崩电流,电流源感应模块感应到电流的增加后发送信号使抑制开关打开,此时APD两端电压低于雪崩击穿电压导致雪崩停止,输出端产生一个电脉冲;电脉冲经过一段时间延时到达复位开关,使电路回到初始接收光子的状态。

本发明公开了大型湿地简易水处理回收方法,其采用大型湿地简易水处理装置对养殖废水进行处理回收;大型湿地简易水处理装置具有环柱形结构,外防水墙侧面设进水管和出水管,内设有第一水流分区档板、人工湿地净化池、过滤盖板、沉淀池,人工湿地净化池设有内防水墙和出水区,内防水墙通过出水区和外防水墙相通,内防水墙设有第二水流分区档板、导管、渗水孔和排污口,排污口穿过过滤盖板和沉淀池相通。废水处理效率高、能耗低的优点。
本发明提供一种遥操作机器人基于视觉的动觉示教控制方法,其步骤包括采用立体视觉技术对现场的作业对象及背景环境(障碍物)进行识别与空间信息提取;以通过视觉识别、计算出的作业对象与机器人末端间的位姿关系为参数,构建作业对象对机器人的虚拟吸引力;以机器人末端沿其速度方向与背景环境(障碍物)的距离为参数,构建机器人所受的障碍物排斥力;将作业对象虚拟吸引力、障碍物虚拟斥力以及机器人抓取物体时的真实作用力合成机器人示教力;通过主端系统与从端系统间的雅可比矩阵,将示教力向操作手柄反馈,从而实现对操作者的动觉示教。本发明相对于现有技术具有如下的优点及技术效果 :[0031] 1. 将机器智能与人类高级决策的优点有机集成,可有效提高机器人的作业效率与局部自主。[0032] 2. 降低对操作人员熟练程度的要求。[0033] 3. 对可能发生的机器人与环境间的碰撞进行预测,可有效保证机器人作业系统的安全性。[0034] 4. 能够缓解操作者控制机器人时的心理紧张及决策疲劳。[0035] 5. 控制回路具有数据量小、信息丰富、超前预测的优点,可有效避免图像时滞导致的机器人操控盲目性。一种遥操纵机器人基于视觉的动觉示教控制方法,其特征在于,包括以下步骤 :[0007] S1、采用立体视觉技术对现场的作业对象及背景环境 ( 障碍物 ) 进行识别与空间信息提取;[0008] S2、以步骤 S1 中获取的作业对象与机器人末端间的位姿关系为参数,构建作业对象对机器人的虚拟吸引力;[0009] S3、以步骤 S1 中获取的机器人末端沿其速度方向与背景环境 ( 障碍物 ) 的距离为参数,构建机器人所受的障碍物排斥力;[0010] S4、将作业对象虚拟吸引力、障碍物虚拟斥力以及机器人抓取物体时的真实作用力合成机器人示教力;[0011] S5、通过主端系统与从端系统间的雅可比矩阵,将示教力向操作手柄反馈,从而实现对操作者的动觉示教。[0012] 根据权利要求 1 所述的遥操纵机器人基于视觉的动觉示教控制方法,其特征在于,所述步骤 S1 包括 :包括以下步骤 :[0013] S11.1、将 Bumblebee 双目摄像头采用 eye-to-hand 方式固定在现场环境正上方,光轴与地面垂直,简称为环境相机;[0014] S11.2、根据环境相机图像中各像素点的颜色、灰度或纹理特征,从中剔除机器人区域及作业对象区域,以获得背景图像;[0015] S11.3、根据图像匹配及摄像机标定的结果,实时计算背景图像中各像素点的空间坐标;[0016] S11.4、采用基于空间自相关性的内插方式来预测估计所剔除的机器人区域及作业对象区域应有像素属性,并结合背景图像像素特征,生成背景环境的高程数据模型;[0017] S12.1、将 Kinect 相机采用 eye-in-hand 方式固连于机器人末端,简称为手部相机;[0018] S12.2、根据手部相机图像中各像素点的颜色、纹理特征,采用结合人口统计与区域增长的图像分割方法来提取作业对象区域,并采用分裂 - 合并算法提取该区域轮廓的近似多边形,取多边形的顶点为作业对象图像特征;[0019] S12.3、根据图像匹配及摄像机标定的结果,实时计算作业对象区域各像素点的空间坐标,并构建其 OBB(Oriented Bounding Box- 有向包围盒 ) 包围盒模型。



