
视觉导航需要稳定且足够多的特征点,而且特征匹配过程要快速。当前移动机器人视觉传感器视场角度小,稳定特征点数量稀疏,机器人快速移动容易造成匹配不足而定位失败。移动机器人受特征匹配的误差、机械动力误差、计量传感器数据精度影响,在移动过程中容易积累误差,如果仅仅依靠自身的传感器实现长程高精度定位还存在较大困难。移动机器人的工作环境随着时间的推移会发生光线、景物、工件的变化或移动,(科技成果评价)在动态环境中进行场景的可靠性定位是移动机器人面临的一个巨大挑战。技术手段:视觉传感器研究,图像处理预期效果:实现移动机器人对周围环境360度实时全向智能感知,并以此为基础实现机器人的自主移动导航。产品结构紧凑,重量轻的低成本全向视觉传感器。

无人驾驶及动力换挡技术是通过各种智能元件对整机进行控制,通过雷达及视觉测量系统、远程视频传输系统等来实现智能化。为此该项目最大的技术难题是如何将电控系统、液压系统、传动系统完美的结合在一起,然后通过电控智能来实现拖拉机的转向、测量、制动、行走、避障及远程视频传输等各种功能。如何解决以上难题,首先需要引进液压、电控、传动等高端技术人才,同时与具有相关项目的研究成果的单位进行合作共同开发。预期达到的目标和技术指标该款智能拖拉机能够在设定的区域内能自动规划路径及导航、自动换挡、自动刹车、发动机转速的自动控制、障碍物的自动避让和远程控制等功能,充分利用智能技术实现农田耕、种、梨、耙、收及植保等的预期目标。其技术指标应符合农田各种需要。

技术难题:目前针对BAT数据、文本数据等已有很好的大数据清洗、查询和大数据可视化,但是针对空间数据库格式的大数据计算、处理、查询、以及大数据可视化尚有很多待完善地方,相关的空间大数据的模型算法。主要内容:针对空间数据的,相关大数据实现。技术指标:拟达到在百亿级的空间数据计算后进行毫秒级的大数据可视化;
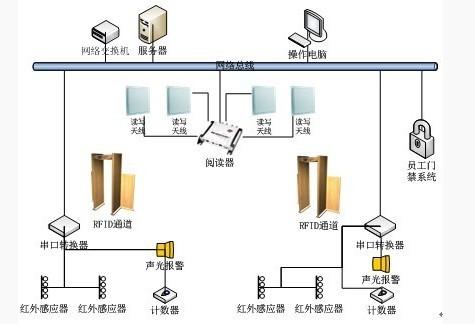
项目内容:综合运用工业机器人技术、射频识别(RFID)技术、 大数据处理技术、云计算技术、传感网络技术、短距离无线通讯技 术,结合激光扫描器等信息传感设备,把档案库房的档案与互联网 连接起来,进行信息交换和通讯,搭建基于物联网技术的智能档案 库房架构,并在EPC物联网架构基础上,集成WSN技术,构建融 合RFID和WSN的档案流通物联网模型,全程运用机器人管理员,以实现对档案在国家重要企事业单位保密档案库房流通过程中智能 化识别、定位、跟踪、监控和管理。技术指标:1、机器人管理员,实现无人化操作,档案存取、管理错误率 <0.01%2、智能库房实现完全无尘、防火、防盗,保密等级达到国家 SSS级3、设备综合运行噪音小,机器人管理员反映速度S3S技术需求:工业机器人技术与公司现有技术的有效结合

CFD仿真模型对系统的优化设计,主要是指可以熟练运用CFD仿真模型和技术手段,对产品系统设计进行超前模拟工况运行,提前测得产品性能参数,对实际产品应用服务。主要技术指标:人员熟练指数90%,可提出数据分析的逻辑,有一定的理论基础。硕士研究生以上学历。产品性能提升,产品制冷性能系数EER提升20%以上。



