
一种基于主动全景视觉传感器的机器人视觉系统,包括全方位视觉传感器、关键面激光光源以及用于对全方位图像进行三维立体摄像测量、障碍物检测、避障和导航的微处理器,所述全方位视觉传感器与所述关键面激光光源配置在同一根轴心线上。

本发明公开了一种基于VR-Forces仿真平台的多无人机协同任务规划仿真系统,其特征是:多无人机协同任务规划仿真系统由n个无人机仿真子系统、一个地面控制中心仿真子系统和一个任务规划仿真场景管理子系统组成。
基于快速电流感应的单光子探测抑制电路,包括雪崩光电二极管,雪崩光电二极管通过电流源感应模块与输出端连接,雪崩光电二极管与电流源感应模块的连接点通过复位开关与输出端连接,电流源感应模块通过抑制开关与复位开关连接;雪崩光电二极管上所加的电压为雪崩电压VB与额外电压VEX之和,当光子到达时APD快速雪崩产生雪崩电流,电流源感应模块感应到电流的增加后发送信号使抑制开关打开,此时APD两端电压低于雪崩击穿电压导致雪崩停止,输出端产生一个电脉冲;电脉冲经过一段时间延时到达复位开关,使电路回到初始接收光子的状态。
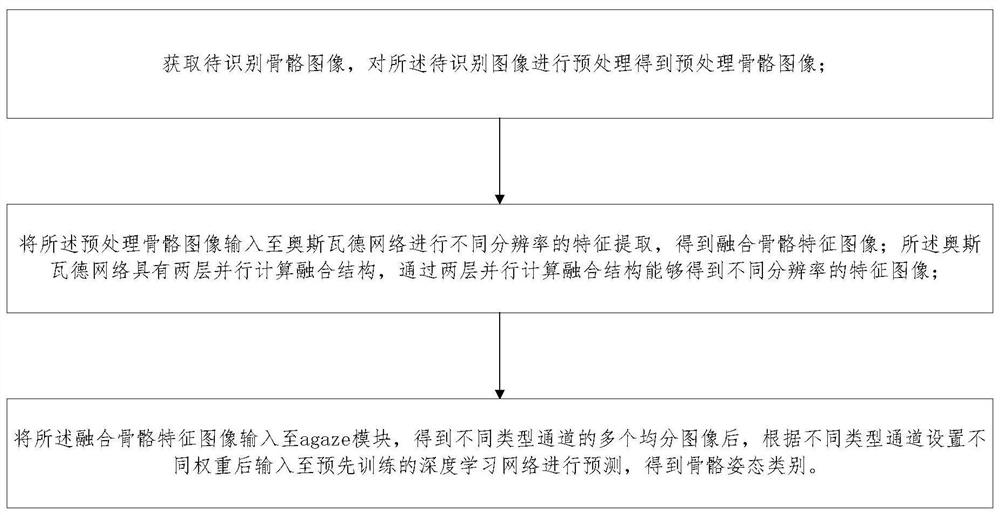
本发明实施例提供的一种基于城市智慧体育的并行融合网络的姿态识别方法和装置,该方法采用全新的奥斯瓦德网络对输入的预处理图像进行特征提取,对从高到低不同分辨率的图像进行特征提取,在整个过程中都保持高分辨率和低分辨率特征相融合后进行预测。本发明进行了多次多尺度融合,使得每一个高分辨率到低分辨率的表征都从其他并行表示中反复接收信息,从而得到丰富的高分辨率表征。因此,预测的关键点更准确,在空间上也更精确。

本发明公开的一种抑制共模EMI的开关电源高频变压器辅助绕组设计方法,该方法通过给变压器一次侧合理设计反相辅助绕组措施,高性能的抑制了开关电源共模传导EMI。依据零等势线理论设计一个和变压器一次绕组并联的反相辅助绕组,反相辅助绕组上产生的电场消除了一、二次绕组的共模噪声电压,有效地抑制了由变压器一、二次侧绕组之间耦合电容引起的共模传导EMI噪声。本发明不仅有效的抑制了共模传导EMI噪声,同时也会使该变压器所在的开关电源损耗有效降低,会大幅度减小电源体积,提高能量转换效率。
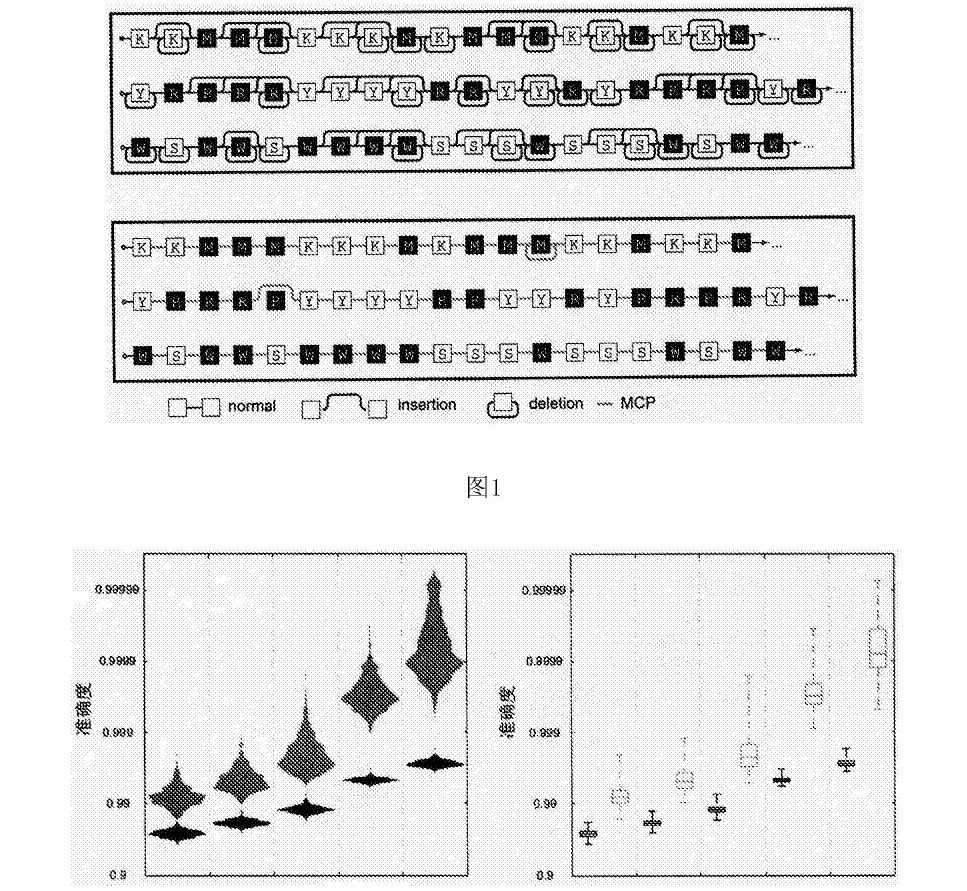
本发明提供了一种测序结果中序列数据错误的检测和校正的方法。测序反应液中包含至少两种不同碱基的核苷酸底物分子;获得简并的基因编码信息。两个或者两个以上简并的编码信息相互对比,本领域技术人员可以判断该位置的编码是否出现相互矛盾的情况。应用本发明所述的方法进行校正,任何对于测序方法的可以降低原始测序数据错误率的微小改进,都可以明显的降低校正以后的编码数据的错误率。
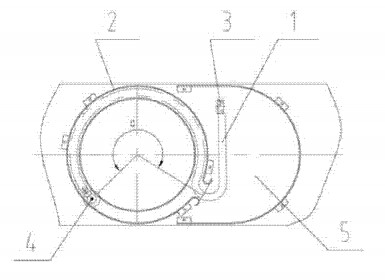
本发明公开了一种用于旋转结构中的线缆连接装置,包括一固定部件,通过轴与固定部件连接的旋转部件,所述的线缆连接装置包括一拖链,以及一导轨,拖链在导轨内滑动,导轨的外侧设置有容纳拖链进入的入口;拖链的两端分别与相对固定端和相对活动端连接,相对活动端设置在导轨内,相对活动端为中空可旋转结构,线缆穿出拖链后直接进入相对活动端的中心孔。本发明由于采用上述结构,根据需求,当旋转结构需要旋转2a角度(360°<2a<720°)时,拖链活动端旋转±α即可完成旋转结构所需总角度。
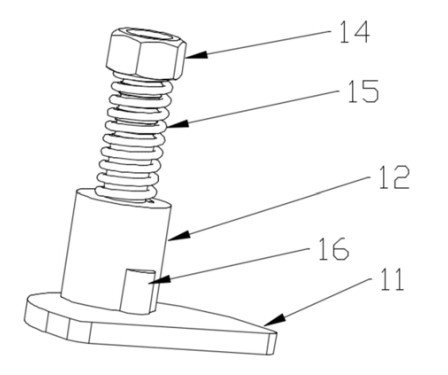
本发明涉及电力器件柜装配技术领域,具体涉及一种快速锁紧装置及控制柜。包括底座、下端与所述底座上面连接的第一支撑体、下端与所述第一支撑体上端连接的第二支撑体,所述第一支撑体侧面设置有挡体,所述第二支撑体外侧面设置有螺纹,所述螺纹上套接有螺母,所述螺母下侧和第一支撑体上端之间设置有弹簧,所述弹簧还套设在第二支撑体外侧面,所述螺母能够沿所述螺纹运动并对弹簧进行挤压或释放进而产生形变。所述快速锁紧装置解决了与电力控制柜的设置解决了电气元件无法进行快速安装的技术问题,产生了提升安装效率的技术效果。



