
本发明公开了一种基于VR-Forces仿真平台的多无人机协同任务规划仿真系统,其特征是:多无人机协同任务规划仿真系统由n个无人机仿真子系统、一个地面控制中心仿真子系统和一个任务规划仿真场景管理子系统组成。
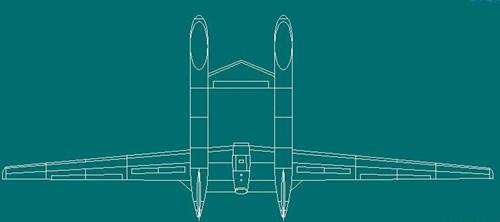
本发明提出了一种安装马格纳斯效应推进系统的高空无人机,采用双机身布局,两个机身外侧安装机翼,两个机身之间安装有马格纳斯效应推进系统和尾翼,机身头部安装有螺旋桨推进器;机翼上表面覆盖有薄膜太阳能电池。其中马格纳斯效应转子在白天可作为升力装置,在相同来流速度下,马格纳斯效应转子只需要提高转速则可大幅提高升力,即使在低速飞行时也可为无人机提供足够升力,降低无人机最小起飞速度和巡航速度,有利于无人机进行短距起降和空中低速巡航侦查;夜间,马格纳斯效应转子可作为风力发电装置,利用高空的稳定、持续的风能进行发电,避免了无人机仅能在白天获取能量密度较低的太阳能为飞行储能、从而使得机翼面积或翼展很大的不足。



