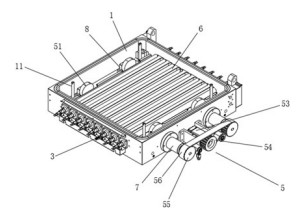
本实用新型公开一种用于芯片焊接的快速冷却的真空共晶炉,包括下壳体、上壳体、多个加热装置、载台和驱动机构,所述下壳体上设置有多个冷却凸台,所述冷却凸台内设置有冷却介质通道;所述上壳体和所述下壳体相连接,所述上壳体和所述下壳体之间形成空腔;所述加热装置和所述冷却凸台逐一间隔设置;所述载台设置在所述空腔内;所述驱动机构和所述载台传动连接,以驱动所述载台脱离或接触所述冷却凸台。本申请的真空共晶炉中的载台可脱离或接触冷却凸台,加热时载台升起脱离冷却凸台,加热迅速,且不会受冷却管道的影响,使得受热均匀。加热后需要快速进行冷却,就将载台下降与冷却凸台贴合,降温速度快。
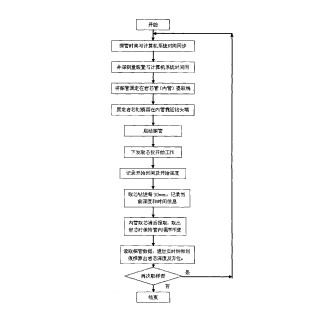
本发明公开了一种多点岩芯定向取芯系统及方法,包括:绳索取芯部分,井下定向仪、探管定向单元、PC机及配套软件、打印机、地面绞车和深度测量系统组成。本发明还公开一种多点岩芯定向取芯方法,包括:通过岩芯定向仪的实时时钟及井深装置的实时时钟,确定相同时刻岩芯的位置及其相对于磁北的方位的对应关系,因而能够正确推算出整个取芯管内岩芯的方位。

一种农业用智能定时喷药器,属于病虫害防治领域,其组成结构包括:供电系统、控制系统、动力系统、储药系统、雾化系统;其特征在于:所述控制系统由光敏电阻和延时电路器件组成,可控制喷药次数、喷药时间以及喷药量。本发明具有结构简单、能耗小、工作稳定性强的优点,可实现农业病虫害防治的智能喷药、精准喷药,其喷药的持续时间精度高,单次喷药量的误差小,可显著提高害虫防治的效率,降低害虫防治的人力成本,满足田间农业病虫害防治的需求。
本发明提供一种遥操作机器人基于视觉的动觉示教控制方法,其步骤包括采用立体视觉技术对现场的作业对象及背景环境(障碍物)进行识别与空间信息提取;以通过视觉识别、计算出的作业对象与机器人末端间的位姿关系为参数,构建作业对象对机器人的虚拟吸引力;以机器人末端沿其速度方向与背景环境(障碍物)的距离为参数,构建机器人所受的障碍物排斥力;将作业对象虚拟吸引力、障碍物虚拟斥力以及机器人抓取物体时的真实作用力合成机器人示教力;通过主端系统与从端系统间的雅可比矩阵,将示教力向操作手柄反馈,从而实现对操作者的动觉示教。本发明相对于现有技术具有如下的优点及技术效果 :[0031] 1. 将机器智能与人类高级决策的优点有机集成,可有效提高机器人的作业效率与局部自主。[0032] 2. 降低对操作人员熟练程度的要求。[0033] 3. 对可能发生的机器人与环境间的碰撞进行预测,可有效保证机器人作业系统的安全性。[0034] 4. 能够缓解操作者控制机器人时的心理紧张及决策疲劳。[0035] 5. 控制回路具有数据量小、信息丰富、超前预测的优点,可有效避免图像时滞导致的机器人操控盲目性。一种遥操纵机器人基于视觉的动觉示教控制方法,其特征在于,包括以下步骤 :[0007] S1、采用立体视觉技术对现场的作业对象及背景环境 ( 障碍物 ) 进行识别与空间信息提取;[0008] S2、以步骤 S1 中获取的作业对象与机器人末端间的位姿关系为参数,构建作业对象对机器人的虚拟吸引力;[0009] S3、以步骤 S1 中获取的机器人末端沿其速度方向与背景环境 ( 障碍物 ) 的距离为参数,构建机器人所受的障碍物排斥力;[0010] S4、将作业对象虚拟吸引力、障碍物虚拟斥力以及机器人抓取物体时的真实作用力合成机器人示教力;[0011] S5、通过主端系统与从端系统间的雅可比矩阵,将示教力向操作手柄反馈,从而实现对操作者的动觉示教。[0012] 根据权利要求 1 所述的遥操纵机器人基于视觉的动觉示教控制方法,其特征在于,所述步骤 S1 包括 :包括以下步骤 :[0013] S11.1、将 Bumblebee 双目摄像头采用 eye-to-hand 方式固定在现场环境正上方,光轴与地面垂直,简称为环境相机;[0014] S11.2、根据环境相机图像中各像素点的颜色、灰度或纹理特征,从中剔除机器人区域及作业对象区域,以获得背景图像;[0015] S11.3、根据图像匹配及摄像机标定的结果,实时计算背景图像中各像素点的空间坐标;[0016] S11.4、采用基于空间自相关性的内插方式来预测估计所剔除的机器人区域及作业对象区域应有像素属性,并结合背景图像像素特征,生成背景环境的高程数据模型;[0017] S12.1、将 Kinect 相机采用 eye-in-hand 方式固连于机器人末端,简称为手部相机;[0018] S12.2、根据手部相机图像中各像素点的颜色、纹理特征,采用结合人口统计与区域增长的图像分割方法来提取作业对象区域,并采用分裂 - 合并算法提取该区域轮廓的近似多边形,取多边形的顶点为作业对象图像特征;[0019] S12.3、根据图像匹配及摄像机标定的结果,实时计算作业对象区域各像素点的空间坐标,并构建其 OBB(Oriented Bounding Box- 有向包围盒 ) 包围盒模型。
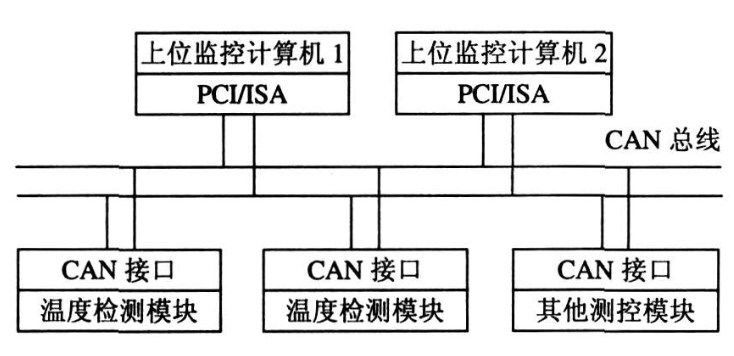
使用CAN总线通信方式,通过CAN总线芯片JTA1050,将三块单片机进行并联,单片机1作为温度检测,单片机2作为主控,单片机3作为电机控制。温度检测模块使用DS18b20传感器进行测温,返回温度值,由单片机1读取;再通过CAN总线方式传送给单片机2主控模块,通过PID智能控制算法,将温度值推算出合理速度值之后,通过OLED显示当前温度值和速度值,并将速度值通过CAN总线方式传送给单片机3电机控制模块,从而调节风速,进而实现智能温度控制。

DCS是针对行业客户对于坐席协作管理应用而开发的网络化视频控制管理系统,依托网络传输编解码技术,将高清处理、音视频、坐席协作、环境控制、可视化管理等应用有效结合在网络环境中,有效形成解决方案,快速反应、高效联动,为用户提供理想、整洁、可靠的指挥室座席应用环境。
一种用于安装防寒型塑料布的装置,是专门用于在窗户上安装防寒保温塑料布的装置,为人们在冬季进行室内防寒保温工作提供了一种新型的技术方案。这种装置是由一种U型槽和与之相对应的压条组成。具体实施方案是将这种U型槽安装在窗户四周的墙壁上,然后将塑料布的四周用压条挤压进U型槽内,从而实现对窗户的密封工作。
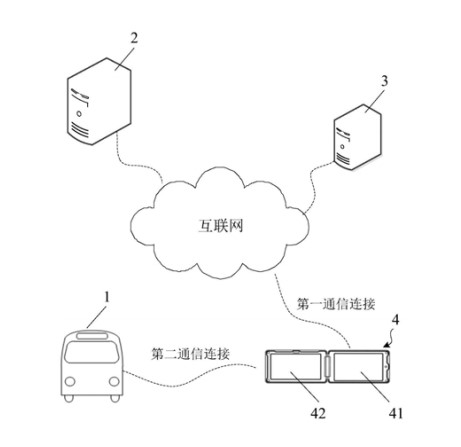
本申请公开了一种汽车教学平板电脑和系统,以实现汽车教学的教学实训一体化,以及实现实训和考核一体化,提高学习效率和教学效果的目的。本申请实施例提供一种汽车教学平板电脑,包括第一设备和第二设备,第一设备和第二设备的一端铰接;第一设备配置有第一操作系统和第一网络模块,第二设备配置有第二操作系统和第二网络模块;第一设备响应外部操作生成第一控制指令或第二控制指令,第一控制指令用于考题下载和/或在线答题,第二控制指令用于生成判卷结果;第二设备响应外部操作生成第三控制指令或第四控制指令,第三控制指令用于故障设置、故障分析和/或故障检测,第四控制指令用于对应第一控制指令的结果进行故障分析和/或故障检测。



