
用于碳钢的绿色环保气相缓蚀剂,由质量-体积浓度为0.8g/L~1.2g/L硅酸钠,1.8g/L~2.3g/L丙氨酸,6.8g/L~8.3g/L苯甲酸钠,3.8g/L~4.5g/L苯甲酸铵溶于蒸馏水组成;上述缓蚀剂的制备方法为:按质量-体积浓度分别称取所需的硅酸钠、丙氨酸、苯甲酸钠和苯甲酸铵,分别用1/4体积的蒸馏水溶解,搅拌均匀;将得到的四种溶液静置后混合并搅拌均匀。本发明用于碳钢的绿色环保气相缓蚀剂,使用硅酸钠、丙氨酸、苯甲酸钠和苯甲酸铵进行复配,绿色环保、高效、对环境污染小,具有良好的协同作用,解决了现有气相缓蚀剂缓蚀性能差、污染大的问题,制备方法简单,使用方便,能够延长碳钢的使用寿命。

本发明公开了一种用于电气化铁路V/V变压器的无功补偿方法,采用一种用于电气化铁路V/V变压器的无功补偿装置,具体步骤为:检测母线电压、母线电流和补偿网络的电流;提取母线电压、母线电流和补偿网络的基波信号,并经ADC电路转换为数字信号发送给控制器;控制器依次采用对称分量法、平衡补偿法对数字量的母线电压、母线电流和补偿网络的基波信号进行处理,得到补偿网络各相补偿导纳;模糊PI调节器根据补偿导纳和晶闸管触发角的关系得到补偿网络的晶闸管触发角;控制器发出触发脉冲经驱动电路发送给晶闸管的门极。本发明的一种用于电气化铁路V/V变压器的无功补偿方法,能够完全补偿无功功率,使负序电流得到彻底消除,并且补偿容量不受限制。

本发明公开了一种台阶形沟槽-场限环复合终端结构,在芯片的中央区域为有源区,外围区域为终端区,有源区和终端区共同的n-衬底下方依次为n型FS层、p+阳极区及其阳极;在有源区中,n-基区中设置有多个并联的单元,每个单元内与n-基区相邻的是波状p基区,p基区上面为p+基区,p+基区中央设置有一个阴极n+发射区,每个n+发射区上方设置有阴极;p+基区上方设置有一个门极;在终端区的n-衬底内,设有与主结相连的两级场限环,场限环的上面有台阶状沟槽。本发明的复合终端结构可使终端击穿电压达到理想体击穿电压的95%以上。

本发明提出一种无人机的可视导航系统。其中,无人机集群的协作交互方法包括以下步骤:无人机集群中的某个无人机确定其通信覆盖范围内满足协作条件的无人机,并根据满足协作条件的无人机建立无人机协作组;确定所述无人机协作组中的多架无人机的机间路由;根据所述机间路由的链路状态信息对所述无人机协作组中的多架无人机分配协作任务;根据所述无人机协作组中的多架无人机的运动状态评估所述链路状态,并根据评估结果更新所述无人机协作组的无人机及每架无人机的协作任务。本发明可靠性强,通信质量高,能较好地适应可视导航中的无人机集群通信环境。

绿化区吸附层优先选用具有多孔特征的建筑废渣填筑,利用多孔材料的吸水性能将水暂时的储存在绿化区内,实现消峰减排、缓解内涝的功能。

本发明公开了一种螺旋弹簧触指的折弯成型方法,包括以下步骤:1)设定螺旋弹簧触指的基本参数;2)制作加工模具;3)进行折弯成型,将一段螺旋弹簧垂直于下半模冲的工作面,将螺旋弹簧圈放在下半模冲上;将上半模冲倒置,使得上、下半圆螺纹槽相对构成圆筒形,并将上、下半模冲的斜面进行面接触,放在压力机平台上,然后控制压力机下压,直至上、下半圆螺纹槽的槽沿接触成一个平面为止,该压制段中的每个螺旋弹簧圈压制成型;重复上述过程,将螺旋弹簧圈一段一段的依次压制,直至整个螺旋弹簧圈的所有节圆全部折弯成型。本发明的方法,螺旋弹簧倾角的成型精度好,装、脱模方便。
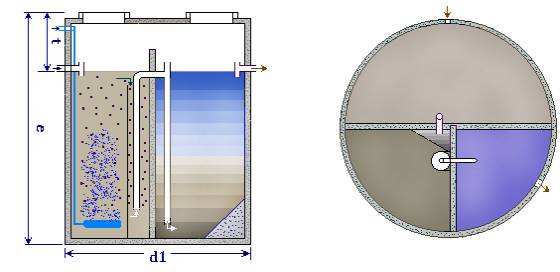
本发明涉及污水处理设备。一种对污水进行了初步固液分离而分离出液体的污水一体化处理固液分离装置,包括固液分离机构和沉淀分离机构,沉淀分离机构包括设有沉淀池的机壳,壳体设有同沉淀池对接在一起的出口端向上倾斜的沉淀物排出通道、推料摆和驱动推料摆朝向沉淀物排出通道摆动的驱动机构,沉淀池的上方设有进料口和于沉淀物排出通道的出口端的下方的清液排出口,推料摆包括摆臂和连接于摆臂下端的推架,推架朝向沉淀物排出通道的一端设有推板、推架的另一端通过驱动机构同壳体连接在一起,摆臂的上端通过摆轴同壳体铰接在一起,沉淀物排出通道的出口端同固液分离机构的进料端对接在一起。本发明解决了现有的固液分离装置负荷量大的问题。
本发明提供一种遥操作机器人基于视觉的动觉示教控制方法,其步骤包括采用立体视觉技术对现场的作业对象及背景环境(障碍物)进行识别与空间信息提取;以通过视觉识别、计算出的作业对象与机器人末端间的位姿关系为参数,构建作业对象对机器人的虚拟吸引力;以机器人末端沿其速度方向与背景环境(障碍物)的距离为参数,构建机器人所受的障碍物排斥力;将作业对象虚拟吸引力、障碍物虚拟斥力以及机器人抓取物体时的真实作用力合成机器人示教力;通过主端系统与从端系统间的雅可比矩阵,将示教力向操作手柄反馈,从而实现对操作者的动觉示教。本发明相对于现有技术具有如下的优点及技术效果 :[0031] 1. 将机器智能与人类高级决策的优点有机集成,可有效提高机器人的作业效率与局部自主。[0032] 2. 降低对操作人员熟练程度的要求。[0033] 3. 对可能发生的机器人与环境间的碰撞进行预测,可有效保证机器人作业系统的安全性。[0034] 4. 能够缓解操作者控制机器人时的心理紧张及决策疲劳。[0035] 5. 控制回路具有数据量小、信息丰富、超前预测的优点,可有效避免图像时滞导致的机器人操控盲目性。一种遥操纵机器人基于视觉的动觉示教控制方法,其特征在于,包括以下步骤 :[0007] S1、采用立体视觉技术对现场的作业对象及背景环境 ( 障碍物 ) 进行识别与空间信息提取;[0008] S2、以步骤 S1 中获取的作业对象与机器人末端间的位姿关系为参数,构建作业对象对机器人的虚拟吸引力;[0009] S3、以步骤 S1 中获取的机器人末端沿其速度方向与背景环境 ( 障碍物 ) 的距离为参数,构建机器人所受的障碍物排斥力;[0010] S4、将作业对象虚拟吸引力、障碍物虚拟斥力以及机器人抓取物体时的真实作用力合成机器人示教力;[0011] S5、通过主端系统与从端系统间的雅可比矩阵,将示教力向操作手柄反馈,从而实现对操作者的动觉示教。[0012] 根据权利要求 1 所述的遥操纵机器人基于视觉的动觉示教控制方法,其特征在于,所述步骤 S1 包括 :包括以下步骤 :[0013] S11.1、将 Bumblebee 双目摄像头采用 eye-to-hand 方式固定在现场环境正上方,光轴与地面垂直,简称为环境相机;[0014] S11.2、根据环境相机图像中各像素点的颜色、灰度或纹理特征,从中剔除机器人区域及作业对象区域,以获得背景图像;[0015] S11.3、根据图像匹配及摄像机标定的结果,实时计算背景图像中各像素点的空间坐标;[0016] S11.4、采用基于空间自相关性的内插方式来预测估计所剔除的机器人区域及作业对象区域应有像素属性,并结合背景图像像素特征,生成背景环境的高程数据模型;[0017] S12.1、将 Kinect 相机采用 eye-in-hand 方式固连于机器人末端,简称为手部相机;[0018] S12.2、根据手部相机图像中各像素点的颜色、纹理特征,采用结合人口统计与区域增长的图像分割方法来提取作业对象区域,并采用分裂 - 合并算法提取该区域轮廓的近似多边形,取多边形的顶点为作业对象图像特征;[0019] S12.3、根据图像匹配及摄像机标定的结果,实时计算作业对象区域各像素点的空间坐标,并构建其 OBB(Oriented Bounding Box- 有向包围盒 ) 包围盒模型。



