
一种基于主动全景视觉传感器的机器人视觉系统,包括全方位视觉传感器、关键面激光光源以及用于对全方位图像进行三维立体摄像测量、障碍物检测、避障和导航的微处理器,所述全方位视觉传感器与所述关键面激光光源配置在同一根轴心线上。

本发明公开了一种基于VR-Forces仿真平台的多无人机协同任务规划仿真系统,其特征是:多无人机协同任务规划仿真系统由n个无人机仿真子系统、一个地面控制中心仿真子系统和一个任务规划仿真场景管理子系统组成。

本发明涉及一种基于传感通讯的有机蔬菜质量远程网络实时监控方法。实现了有机蔬菜生长环境监测无线传感网的组建,实现对有机蔬菜生产环境的温度、湿度、CO2浓度等数据的实时采集、实时传输和实时监测。克服了现有技术无法对有机蔬菜成长环境和成长状态变化的参数信息数据进行采集、标识和监控。
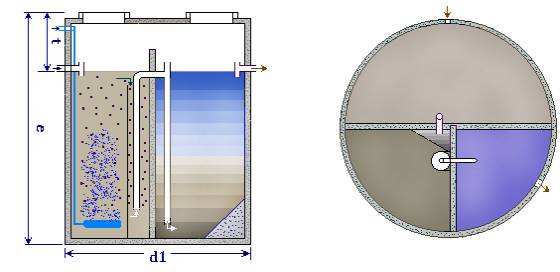
本发明涉及污水处理设备。一种对污水进行了初步固液分离而分离出液体的污水一体化处理固液分离装置,包括固液分离机构和沉淀分离机构,沉淀分离机构包括设有沉淀池的机壳,壳体设有同沉淀池对接在一起的出口端向上倾斜的沉淀物排出通道、推料摆和驱动推料摆朝向沉淀物排出通道摆动的驱动机构,沉淀池的上方设有进料口和于沉淀物排出通道的出口端的下方的清液排出口,推料摆包括摆臂和连接于摆臂下端的推架,推架朝向沉淀物排出通道的一端设有推板、推架的另一端通过驱动机构同壳体连接在一起,摆臂的上端通过摆轴同壳体铰接在一起,沉淀物排出通道的出口端同固液分离机构的进料端对接在一起。本发明解决了现有的固液分离装置负荷量大的问题。

一种水下土工布搭接铺设方法,属于海岸工程建筑施工技术。由于软弱地基的复杂性,地基承载力的不均衡,水下土工布总是出现压载漂移。尤其在两块土工布的搭接处总是出现脱节现象。这一问题在续后工程中很难予以有效弥补,埋下质量隐患。
一种基于小波理论的印刷品墨斑的测量方法。该方法按照以下方法进行印刷品墨斑的测量,通过扫描仪进行印刷墨斑的图像采集,按照预定的尺寸进行图像分析取样,利用不同的小波基进行多级小波分解图像,将图像分解为高频部分和低频部分,并除去高频噪声部分;采用离散小波逆变换对墨斑图像进行还原,得到印刷墨斑平滑图像,并计算平滑墨斑图像的灰度值的变化,即墨斑大小的程度。

绿化区吸附层优先选用具有多孔特征的建筑废渣填筑,利用多孔材料的吸水性能将水暂时的储存在绿化区内,实现消峰减排、缓解内涝的功能。



