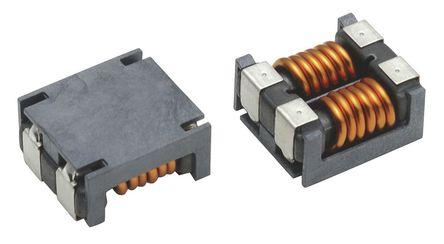
本发明公开的一种抑制共模EMI的开关电源高频变压器辅助绕组设计方法,该方法通过给变压器一次侧合理设计反相辅助绕组措施,高性能的抑制了开关电源共模传导EMI。依据零等势线理论设计一个和变压器一次绕组并联的反相辅助绕组,反相辅助绕组上产生的电场消除了一、二次绕组的共模噪声电压,有效地抑制了由变压器一、二次侧绕组之间耦合电容引起的共模传导EMI噪声。本发明不仅有效的抑制了共模传导EMI噪声,同时也会使该变压器所在的开关电源损耗有效降低,会大幅度减小电源体积,提高能量转换效率。

本发明公开了大型湿地简易水处理回收方法,其采用大型湿地简易水处理装置对养殖废水进行处理回收;大型湿地简易水处理装置具有环柱形结构,外防水墙侧面设进水管和出水管,内设有第一水流分区档板、人工湿地净化池、过滤盖板、沉淀池,人工湿地净化池设有内防水墙和出水区,内防水墙通过出水区和外防水墙相通,内防水墙设有第二水流分区档板、导管、渗水孔和排污口,排污口穿过过滤盖板和沉淀池相通。废水处理效率高、能耗低的优点。

本发明公开了一种在线测量接触电阻的方法,包括以下步骤:首先,对待测量接触元件靠近热源区的表面点进行实时的温度测量,得到温度数据;然后,依靠建立的一阶热路模型公式和Origin软件依据温度数据绘制的温度响应曲线,求出此接触元件的热响应常数;最终根据公式推导得到待测量接触元件的接触电阻。本发明的方法能够在线准确的测量一些诸如高压开关柜母排接头、开关接头、闸刀等电接头的接触电阻,为电力设备的状态监测、分析和故障处理等实际应用提供数据参考。
本发明公开了分离富集外周血中造血干细胞(hematopoietic?stem?cell,HSC)的方法,更好地为造血干细胞进行后续研究提供基础,涉及生物医学领域。方法包括树状超支聚合物与鼠抗人造血干细胞单克隆抗体共价偶联、鼠抗人造血干细胞单克隆抗体修饰的树状超支聚合物再包被长链生物素分子、鼠抗人造血干细胞单克隆抗体和长链生物素共修饰的树状超支聚合物捕获外周血样品中的造血干细胞、链霉亲和素修饰的纳米磁珠识别并偶联外周血中长链生物素化树状超支聚合物、被捕获造血干细胞的分离及重悬等步骤。重悬液可以直接进行后续分析,与传统的细胞分离方法相比,该方法更适用于在复杂外周血样品中对造血干细胞进行磁分离,提高了外周血样品中造血干细胞分离效率。

本发明提供一种爪形离合器控制装置,属于纺织机械技术领域。它包括摆动驱动杆、杠杆、回转轴、爪形离合器,杠杆铰接在杠杆支座上,复位弹簧连接杠杆的左端和机架,驱动气缸的活塞杆下端连接摆动驱动杆,摆动驱动杆穿过杠杆,摆动驱动杆的上下两端设置有垫片,下端的垫片和杠杆之间设置有压紧弹簧,回转轴可转动设置在回转轴支座上,回转轴和回转轴支座之间设置有滚针轴承,回转轴的上端连接有爪形离合器,回转轴的下端设置有台阶段,回转轴的台阶段和杠杆的右端连接,杠杆的右端设置有轴承支座,向心球轴承设置于轴承支座和回转轴之间。本发明实现爪形离合器回转运动和上下离合的复合运动,结构简单巧妙,适用性强,成本低。

本发明是一种基于链路代价转换的卫星负载平衡方法,该方法是在卫星虚拟拓扑策略的基础上,对拓扑快照进行LEO(低轨)层链路代价转换和分层分流。因此,利用卫星星座运行的可预测性和周期性,将系统运行时间划分为若干个相同的时间段,并在每个时间段个分n个间隙tp,每个时隙内对星间链路进行链路过载判断。对全球覆盖区域进行拥塞等级划分,配合LEO卫星链路实时流量,在链路拥塞时进行代价调整和路径优化,平衡整个网络的流量。并在此基础上配合MEO层卫星网络,对不同服务质量(QoS)的传输业务进行合理的路径选择,在满足高优先级业务时延的同时,提高整网的吞吐量。

本发明可见信息相互感应交流无线互联网,为解决现有网络交友、找合作、找买卖等,存有虚假信息、危害社会信用体系的嫌疑及风险等弊端。为此,本发明提出,在人们随身的无线电设备,如无线手机、无线手环、移动电脑等为载体,装入本发明的主程序系统1、注册登录模块2、定位搜索模块3、信息发送模块4、信息接受模块5、信息交流界面6、拍照影音模块7,好友社区模块8、N个功能模块9、数据交流通道10等功能模块组成无线互联网即时通信息交流工具,定位确认实现当事人先在真实、现实的可见范围内进行无线感应信息交流,加为好友后远、近距离都可进行信息交流,以此来降低、节制虚假信息的风险,有助提高网络信息真实度、社会诚信度。
本发明提供一种遥操作机器人基于视觉的动觉示教控制方法,其步骤包括采用立体视觉技术对现场的作业对象及背景环境(障碍物)进行识别与空间信息提取;以通过视觉识别、计算出的作业对象与机器人末端间的位姿关系为参数,构建作业对象对机器人的虚拟吸引力;以机器人末端沿其速度方向与背景环境(障碍物)的距离为参数,构建机器人所受的障碍物排斥力;将作业对象虚拟吸引力、障碍物虚拟斥力以及机器人抓取物体时的真实作用力合成机器人示教力;通过主端系统与从端系统间的雅可比矩阵,将示教力向操作手柄反馈,从而实现对操作者的动觉示教。本发明相对于现有技术具有如下的优点及技术效果 :[0031] 1. 将机器智能与人类高级决策的优点有机集成,可有效提高机器人的作业效率与局部自主。[0032] 2. 降低对操作人员熟练程度的要求。[0033] 3. 对可能发生的机器人与环境间的碰撞进行预测,可有效保证机器人作业系统的安全性。[0034] 4. 能够缓解操作者控制机器人时的心理紧张及决策疲劳。[0035] 5. 控制回路具有数据量小、信息丰富、超前预测的优点,可有效避免图像时滞导致的机器人操控盲目性。一种遥操纵机器人基于视觉的动觉示教控制方法,其特征在于,包括以下步骤 :[0007] S1、采用立体视觉技术对现场的作业对象及背景环境 ( 障碍物 ) 进行识别与空间信息提取;[0008] S2、以步骤 S1 中获取的作业对象与机器人末端间的位姿关系为参数,构建作业对象对机器人的虚拟吸引力;[0009] S3、以步骤 S1 中获取的机器人末端沿其速度方向与背景环境 ( 障碍物 ) 的距离为参数,构建机器人所受的障碍物排斥力;[0010] S4、将作业对象虚拟吸引力、障碍物虚拟斥力以及机器人抓取物体时的真实作用力合成机器人示教力;[0011] S5、通过主端系统与从端系统间的雅可比矩阵,将示教力向操作手柄反馈,从而实现对操作者的动觉示教。[0012] 根据权利要求 1 所述的遥操纵机器人基于视觉的动觉示教控制方法,其特征在于,所述步骤 S1 包括 :包括以下步骤 :[0013] S11.1、将 Bumblebee 双目摄像头采用 eye-to-hand 方式固定在现场环境正上方,光轴与地面垂直,简称为环境相机;[0014] S11.2、根据环境相机图像中各像素点的颜色、灰度或纹理特征,从中剔除机器人区域及作业对象区域,以获得背景图像;[0015] S11.3、根据图像匹配及摄像机标定的结果,实时计算背景图像中各像素点的空间坐标;[0016] S11.4、采用基于空间自相关性的内插方式来预测估计所剔除的机器人区域及作业对象区域应有像素属性,并结合背景图像像素特征,生成背景环境的高程数据模型;[0017] S12.1、将 Kinect 相机采用 eye-in-hand 方式固连于机器人末端,简称为手部相机;[0018] S12.2、根据手部相机图像中各像素点的颜色、纹理特征,采用结合人口统计与区域增长的图像分割方法来提取作业对象区域,并采用分裂 - 合并算法提取该区域轮廓的近似多边形,取多边形的顶点为作业对象图像特征;[0019] S12.3、根据图像匹配及摄像机标定的结果,实时计算作业对象区域各像素点的空间坐标,并构建其 OBB(Oriented Bounding Box- 有向包围盒 ) 包围盒模型。



