
针对传统空调机房控制的痛点(制冷量冗余、PID调控的弊端、参数设置不合理)研制了AI空调节能智控模块,通过引入空调系统各设备能耗数据,采集相关设备运行数据,结合深度学习、MPC算法技术,从数十万条空调数据中寻找最节能的运行参数,实时进行空调系统参数调整,达到系统热平衡、供需平衡、环境温度稳定的同时,实现最节能运行,预计平均节能率可达10~20%。针对客户生产用气、空压机设备管理、节能降碳等需求研制空压站一级能效智控模块,对空压机站房、管网进行联网联控,对多站、单站空压机进行数字化管控,实现数字化站房、智能化控制和整站节能。
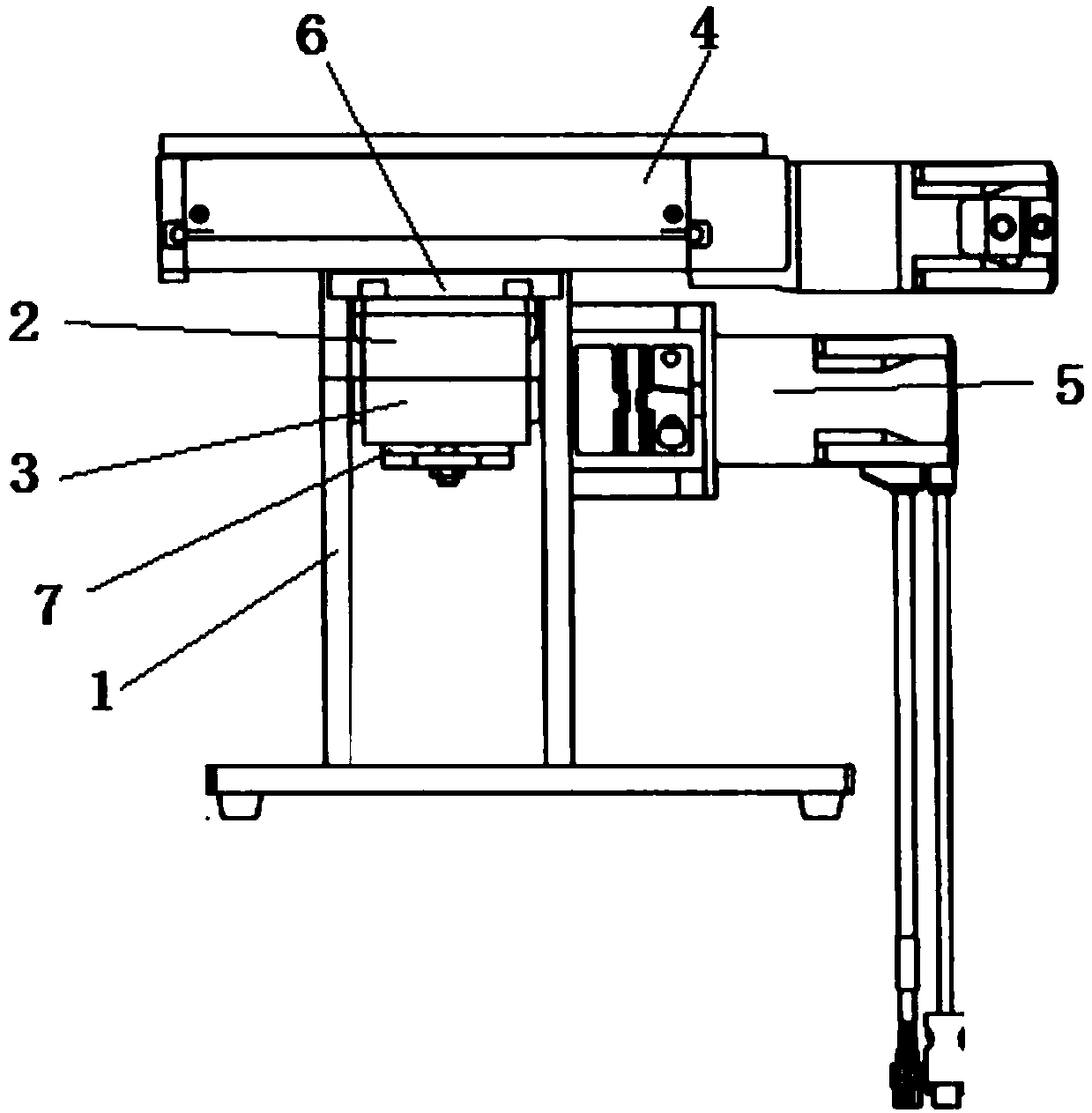
本实用新型公开了一种仿真口腔加工机器人及其控制方法,包括一支座、控制器及仿真的人体上颚和人体下颚;仿真人体上颚与设置于支座上的第一驱动装置固定连接,仿真人体下颚与设置于支座上的第二驱动装置固定连接,控制器分别与第一驱动装置、第二驱动装置电性连接,用于程序控制第一驱动装置和第二驱动装置的协同动作;第一驱动装置用于驱动仿真人体上颚做直线往复研磨运动,第二驱动装置用于驱动仿真人体下颚做旋转运动,控制仿真人体下颚与上颚间的开合。本实用新型通过第一驱动装置和第二驱动装置的交替配合,使仿真上下颚的相对运动仿照了人体咀嚼时的下颚动作,实现了高度仿真人体在咀嚼时的咀嚼动作,准确模拟食物在口腔加工中的过程,为利用体外消化系统模拟人体消化和测量食物的消化吸收提供准确数据。
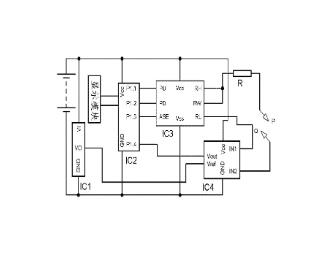
一种直流稳压电源内阻测量装置,它由测量表笔P、测量表笔Q、电流传感器模块、数字电位器、补偿电阻R、单片机、显示模块、电源、集成稳压器组成,(科技成果评价)该装置可以快速、准确地测量直流稳压电源的内阻,其结构简单、稳定性好,具有较强的实用性。
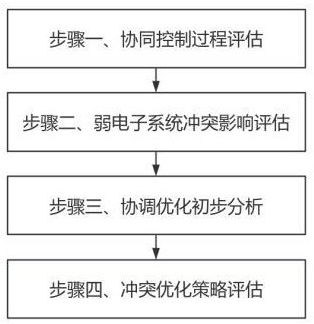
智能化弱电系统智能化控制方法,包括:协同控制过程评估:在指定建筑对应的弱电系统中,将各弱电子系统进行融合,分析各弱电子系统在融合过程中对应的控制目标冲突综合影响指标;当应用于指定建筑对应的弱电系统中,各弱电子系统的通信协议和数据格式不统一时,通过获取进行融合的各弱电子系统对应的控制目标冲突综合影响指标,控制目标冲突综合影响指标包括冲突矩阵、冲突严重程度系数和加权重要性指标,进而计算进行融合的各弱电子系统在进行融合过程中对应的控制目标冲突情况;协调优化初步分析:根据各弱电子系统在进行融合过程中对应的系统冲突情况,进而对控制目标冲突情况为严重的各弱电子系统进行协调优化
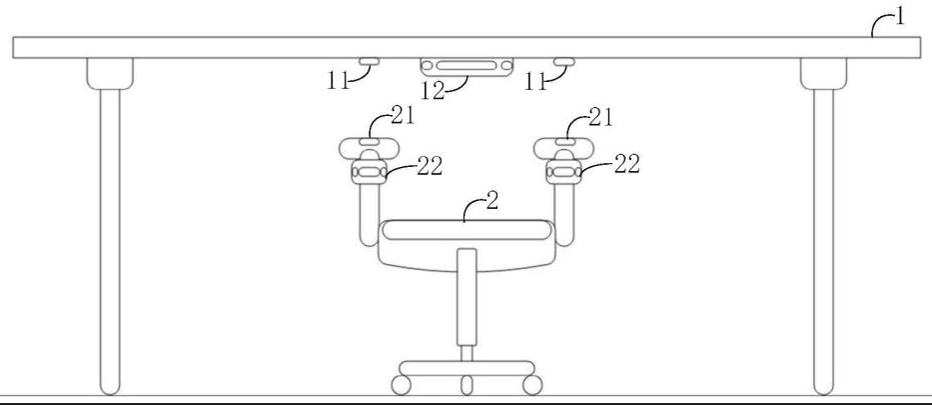
智能椅自动对位充电方法,智能椅包括可充电电源、电能接收单元、用于定位电能接收单元的第一定位器、用于使智能椅行进和转向的运动单元,方法包括:通过第一定位器与充电设备上用于定位电能输出单元的第二定位器进行交互,从而确定第一定位器相对于第二定位器的方位数据;根据方位数据计算转向角度;通过运动单元按照转向角度使智能椅旋转至第一行进方向;通过运动单元以第一行进方向行进,并在行进过程中通过第一定位器与第二定位器进行交互,从而在行进至第一目标位置;通过运动单元按照预设角度使智能椅旋转至第二方向;通过运动单元以第二方向,从而在行进到第二目标位置后停止,使得电能输出单元能够对准电能接收单元进行充电。

本发明公开了一种基于VR-Forces仿真平台的多无人机协同任务规划仿真系统,其特征是:多无人机协同任务规划仿真系统由n个无人机仿真子系统、一个地面控制中心仿真子系统和一个任务规划仿真场景管理子系统组成。
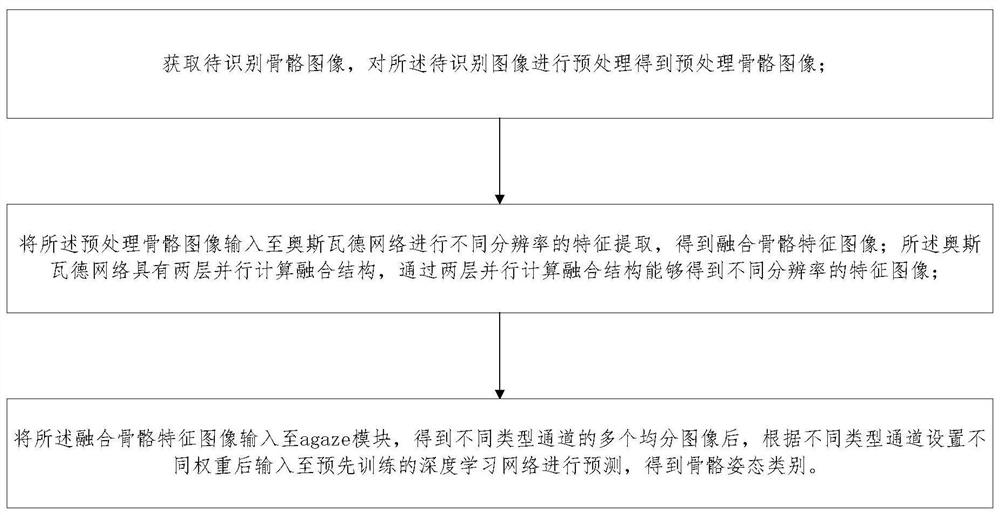
本发明实施例提供的一种基于城市智慧体育的并行融合网络的姿态识别方法和装置,该方法采用全新的奥斯瓦德网络对输入的预处理图像进行特征提取,对从高到低不同分辨率的图像进行特征提取,在整个过程中都保持高分辨率和低分辨率特征相融合后进行预测。本发明进行了多次多尺度融合,使得每一个高分辨率到低分辨率的表征都从其他并行表示中反复接收信息,从而得到丰富的高分辨率表征。因此,预测的关键点更准确,在空间上也更精确。

本实用新型公开一种分离报警与集合控制的电子钱包,包括钱包本体、RFID读写模块、MCU控制单元、报警器及RFID标签;RFID读写模块、MCU控制单元及报警器设置在钱包本体上,RFID读写模块及报警器分别与MCU控制单元电连接,RFID标签粘贴于多个不同管理物件上;RFID标签远离RFID读写模块时,RFID读写模块输送管理物件分离信号至MCU控制单元,MCU控制单元触发报警器进行报警。本实用新型便于物件管理,使得不会遗漏需携带的物件。



