
本发明公开了大型湿地简易水处理回收方法,其采用大型湿地简易水处理装置对养殖废水进行处理回收;大型湿地简易水处理装置具有环柱形结构,外防水墙侧面设进水管和出水管,内设有第一水流分区档板、人工湿地净化池、过滤盖板、沉淀池,人工湿地净化池设有内防水墙和出水区,内防水墙通过出水区和外防水墙相通,内防水墙设有第二水流分区档板、导管、渗水孔和排污口,排污口穿过过滤盖板和沉淀池相通。废水处理效率高、能耗低的优点。
本发明提供一种遥操作机器人基于视觉的动觉示教控制方法,其步骤包括采用立体视觉技术对现场的作业对象及背景环境(障碍物)进行识别与空间信息提取;以通过视觉识别、计算出的作业对象与机器人末端间的位姿关系为参数,构建作业对象对机器人的虚拟吸引力;以机器人末端沿其速度方向与背景环境(障碍物)的距离为参数,构建机器人所受的障碍物排斥力;将作业对象虚拟吸引力、障碍物虚拟斥力以及机器人抓取物体时的真实作用力合成机器人示教力;通过主端系统与从端系统间的雅可比矩阵,将示教力向操作手柄反馈,从而实现对操作者的动觉示教。本发明相对于现有技术具有如下的优点及技术效果 :[0031] 1. 将机器智能与人类高级决策的优点有机集成,可有效提高机器人的作业效率与局部自主。[0032] 2. 降低对操作人员熟练程度的要求。[0033] 3. 对可能发生的机器人与环境间的碰撞进行预测,可有效保证机器人作业系统的安全性。[0034] 4. 能够缓解操作者控制机器人时的心理紧张及决策疲劳。[0035] 5. 控制回路具有数据量小、信息丰富、超前预测的优点,可有效避免图像时滞导致的机器人操控盲目性。一种遥操纵机器人基于视觉的动觉示教控制方法,其特征在于,包括以下步骤 :[0007] S1、采用立体视觉技术对现场的作业对象及背景环境 ( 障碍物 ) 进行识别与空间信息提取;[0008] S2、以步骤 S1 中获取的作业对象与机器人末端间的位姿关系为参数,构建作业对象对机器人的虚拟吸引力;[0009] S3、以步骤 S1 中获取的机器人末端沿其速度方向与背景环境 ( 障碍物 ) 的距离为参数,构建机器人所受的障碍物排斥力;[0010] S4、将作业对象虚拟吸引力、障碍物虚拟斥力以及机器人抓取物体时的真实作用力合成机器人示教力;[0011] S5、通过主端系统与从端系统间的雅可比矩阵,将示教力向操作手柄反馈,从而实现对操作者的动觉示教。[0012] 根据权利要求 1 所述的遥操纵机器人基于视觉的动觉示教控制方法,其特征在于,所述步骤 S1 包括 :包括以下步骤 :[0013] S11.1、将 Bumblebee 双目摄像头采用 eye-to-hand 方式固定在现场环境正上方,光轴与地面垂直,简称为环境相机;[0014] S11.2、根据环境相机图像中各像素点的颜色、灰度或纹理特征,从中剔除机器人区域及作业对象区域,以获得背景图像;[0015] S11.3、根据图像匹配及摄像机标定的结果,实时计算背景图像中各像素点的空间坐标;[0016] S11.4、采用基于空间自相关性的内插方式来预测估计所剔除的机器人区域及作业对象区域应有像素属性,并结合背景图像像素特征,生成背景环境的高程数据模型;[0017] S12.1、将 Kinect 相机采用 eye-in-hand 方式固连于机器人末端,简称为手部相机;[0018] S12.2、根据手部相机图像中各像素点的颜色、纹理特征,采用结合人口统计与区域增长的图像分割方法来提取作业对象区域,并采用分裂 - 合并算法提取该区域轮廓的近似多边形,取多边形的顶点为作业对象图像特征;[0019] S12.3、根据图像匹配及摄像机标定的结果,实时计算作业对象区域各像素点的空间坐标,并构建其 OBB(Oriented Bounding Box- 有向包围盒 ) 包围盒模型。

位移传感器标定仪及其使用方法。位移传感器标定仪,包括弹性体和螺杆,弹性体包括上、下两个薄壁,弹性体的一端设有台阶孔及端盖,螺杆贯穿上、下两个薄壁,螺杆下端与位移传感器接触。本发明位移传感器标定仪的几何尺寸和材料确定后,弹性体的垂直接近量与水平接近量的比值c是固定的,故可以通过这个已知的比值c和测量弹性体的垂直方向接近量来求得水平方向的微小接近量,从而实现了用普通的位移传感器来标定位移传感器。

本发明公开了一种水性凹印油墨连接料,由一定重量百分比的以下组份组成 :环氧树脂E-44、开环剂、溶剂、助剂、水性聚氨酯树脂和稀释剂 ;其中助剂为催化剂、阻聚剂、扩链剂、交联剂、消泡剂和流平剂组成的混合物。本发明还公开了其制备方法 :先称取上述组分环氧树脂 E-44 用乙酸乙酯稀释用改性剂在催化剂作用、恒温水浴中反应 4.5 小时使环氧树脂开环并引入羟基 ;然后把上述改性的环氧树脂加入到水性聚氨酯树脂、扩链剂和交联剂的混合液中反应,然加入流平剂、消泡剂和稀释剂,收料即得。本发明所采用的技术方案是,一种水性凹印油墨连接料,按重量百分比由以下组份组成 :1% ~ 8% 环氧树脂 E-44、1% ~ 8% 开环剂、2% ~ 16% 溶剂、5% ~ 10% 助剂、40% ~ 80%水性聚氨酯树脂、10% ~ 30% 稀释剂,以上各组分的重量百分比总和为 100%,其中助剂为催化剂、阻聚剂、扩链剂、交联剂、消泡剂和流平剂组成的混合物。本发明的有益效果是 :1、本发明水性凹印油墨连接料的黏度最小值为 0.02Pa·s(25℃),黏度最大值为 0.3Pa·s(25℃),PH 值为 8 ~ 9,光泽度好,因此能适用于高档印刷品印刷。2、由于水性凹印油墨连接料无溶剂排放、安全无污染,生产效率高,能制备出质量优异水性凹印油墨明显优于普通凹印油墨连接料,设备简单、价格便宜等优点对于实现环保、健康的绿色印刷十分有利。3、性能稳定耐化学性、耐热性好、力学性能好、干燥速度快、反应条件温和、时间短。本发明水性凹印油墨连接料的制备方法,反应条件温和,工艺简单,容易实现,环保无污染,所用设备价格便宜、体积小,适合广泛推广使用。

本发明公开了一种旋翼式无人机失控坠落保护装置,包括底盘和安装在底盘上的弹射机构,所述弹射机构包括:固定在底盘上的燃烧室,底部与燃烧室连通的弹射筒,安装在弹射筒内的降落伞以及点火装置,所述弹射筒设有至少两个,各弹射筒环向均匀分布且分别向外倾斜发散。还公开了一种旋翼式无人机和使用本发明的旋翼式无人机失控坠落保护装置的无人机失控坠落保护方法。本发明通过设置至少两个弹射筒,并且将弹射筒向均匀分布且分别向外倾斜发散设置,从而降低了火药量,从而减轻爆炸时对无人机的破坏,还抵消了一部分反作用力对无人机的冲击,进一步减轻火药弹射对无人机的破坏。
本发明公开了一种用于工业废气除尘的清灰检测装置,包括检测单元、显示模块和过滤材料层,检测单元包括固定杆和m个检测子单元,固定杆固定连接在框架上;每个检测子单元包括风叶、导杆和红外传感器,导杆的一端固定连接在固定杆上,导杆的另一端与风叶连接;红外传感器与导杆固定连接,与固定杆固定连接,或者嵌至在过滤材料层内壁上;显示模块位于框架外侧,红外传感器的信号输出端与显示模块的信号输入端连接;m为大于或等于1的整数。该清灰检测装置可准确检测出各过滤材料层是否需要进行清灰。同时还公开一种除尘设备,可以根据清灰检测装置的检测结果,对单个或部分过滤材料层进行清灰处理,提高过滤材料层的使用寿命。

本发明公开了一种地嵌式自行车停车位,包括电子密码器和嵌入地面安装的锁车箱,锁车箱包括锁车槽、锁车栓和电磁锁;本发明地嵌式自行车停车位不占用额外面积,让自行车有序停放,实行智能化自助管理,安全防盗,并且美化城市,当无自行车停放时,即为常规的道路或广场;本发明地嵌式自行车停车位可采用停车人自助设置一次性取车密码,安全可靠;本发明地嵌式自行车停车位采用电磁锁具锁车,保障级别高,稳定可靠;本发明地嵌式自行车停车位可由市容部门或相关公司统一管理,当停车人遗忘停车密码时,可凭有效证件请管理员解密取车。工作原理 :上述锁车箱是供自行车停放并锁扣的,电子密码锁为锁车时提供密码保护;电磁锁根据电子密码器的指令打开或闭合锁车栓,从而推动锁车栓锁住或打开自行车车轮;上述电磁锁根据电子密码器的指令控制锁扣前后摆动,当锁扣向前摆动时,锁插在锁扣的作用下转动,从而拉动锁车栓向后运动,实现开锁,当锁扣向后摆动时,锁插在扭簧的作用下归位,实现锁扣。有益效果 :1、本发明地嵌式自行车停车位不占用额外面积,让自行车有序停放,实行智能化自助管理,安全防盗,并且美化城市,当无自行车停放时,即为常规的道路或广场;2、本发明地嵌式自行车停车位可采用停车人自助设置一次性取车密码,安全可靠;3、本发明地嵌式自行车停车位采用电磁锁具锁车,保障级别高,稳定可靠;4、本发明地嵌式自行车停车位可由市容部门或相关公司统一管理,当停车人遗忘停车密码时,可凭有效证件请管理解密取车;5、本发明地嵌式自行车停车位大部分嵌入地下,不影响市容,遮阳篷部分经过专业设计既可给自行车挡雨遮阳,也可以美化城市。
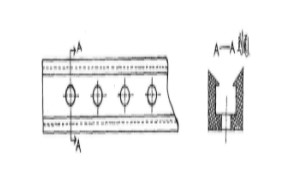
一种用于安装防寒型塑料布的装置,是专门用于在窗户上安装防寒保温塑料布的装置,为人们在冬季进行室内防寒保温工作提供了一种新型的技术方案。这种装置是由一种U型槽和与之相对应的压条组成。具体实施方案是将这种U型槽安装在窗户四周的墙壁上,然后将塑料布的四周用压条挤压进U型槽内,从而实现对窗户的密封工作。



