
(1)技术需求①设备故障的智能识别:融合多模态感知数据,利用人工智能等技术准确、高效发现设备故障,实现故障问题的及时处理。②设备故障的智能预测:基于大数据分析、人工智能等技术,对设备运行数据进行深度挖掘,提前预测潜在的故障,便于提前制定维护计划,实现设备的预防性维护,减少设备停机率。(2)成果核心技术涉及的核心技术有多模态传感器数据融合技术、基于机器学习和深度神经网络的故障识别分析算法以及基于AI的时间序列的故障预测分析算法等关键性技术。(3)创新点多模态数据融合与动态感知架构:构建多源传感器数据的融合分析框架,通过时间序列对齐与特征级联技术,实现设备运行状态的全维度动态感知。

基于视觉数据,融合激光雷达、惯性导航和里程仪等感知手段,实现自动建图、定位、路径规划和导航等功能,多传感器联合识别,实现高于5cm障碍物的全方位避障功能,自动驶向无线充电站,实现全天候自动运行,最大负载1500kg,可配合叉车完成长距离的自动搬运工作机器人用于仓储和生产线,可自动完成托盘拣选、边线运送、在制品运送和成品存放等物料处理作业。

视觉导航需要稳定且足够多的特征点,而且特征匹配过程要快速。当前移动机器人视觉传感器视场角度小,稳定特征点数量稀疏,机器人快速移动容易造成匹配不足而定位失败。移动机器人受特征匹配的误差、机械动力误差、计量传感器数据精度影响,在移动过程中容易积累误差,如果仅仅依靠自身的传感器实现长程高精度定位还存在较大困难。移动机器人的工作环境随着时间的推移会发生光线、景物、工件的变化或移动,(科技成果评价)在动态环境中进行场景的可靠性定位是移动机器人面临的一个巨大挑战。技术手段:视觉传感器研究,图像处理预期效果:实现移动机器人对周围环境360度实时全向智能感知,并以此为基础实现机器人的自主移动导航。产品结构紧凑,重量轻的低成本全向视觉传感器。

技术难题:目前针对BAT数据、文本数据等已有很好的大数据清洗、查询和大数据可视化,但是针对空间数据库格式的大数据计算、处理、查询、以及大数据可视化尚有很多待完善地方,相关的空间大数据的模型算法。主要内容:针对空间数据的,相关大数据实现。技术指标:拟达到在百亿级的空间数据计算后进行毫秒级的大数据可视化;
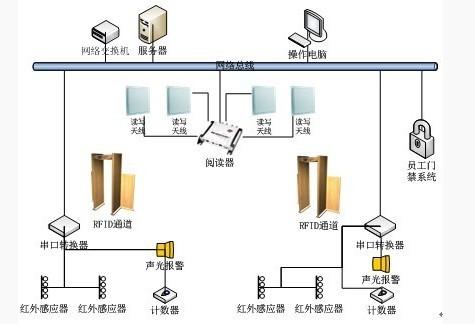
项目内容:综合运用工业机器人技术、射频识别(RFID)技术、 大数据处理技术、云计算技术、传感网络技术、短距离无线通讯技 术,结合激光扫描器等信息传感设备,把档案库房的档案与互联网 连接起来,进行信息交换和通讯,搭建基于物联网技术的智能档案 库房架构,并在EPC物联网架构基础上,集成WSN技术,构建融 合RFID和WSN的档案流通物联网模型,全程运用机器人管理员,以实现对档案在国家重要企事业单位保密档案库房流通过程中智能 化识别、定位、跟踪、监控和管理。技术指标:1、机器人管理员,实现无人化操作,档案存取、管理错误率 <0.01%2、智能库房实现完全无尘、防火、防盗,保密等级达到国家 SSS级3、设备综合运行噪音小,机器人管理员反映速度S3S技术需求:工业机器人技术与公司现有技术的有效结合



