
本发明提出一种无人机的可视导航系统。其中,无人机集群的协作交互方法包括以下步骤:无人机集群中的某个无人机确定其通信覆盖范围内满足协作条件的无人机,并根据满足协作条件的无人机建立无人机协作组;确定所述无人机协作组中的多架无人机的机间路由;根据所述机间路由的链路状态信息对所述无人机协作组中的多架无人机分配协作任务;根据所述无人机协作组中的多架无人机的运动状态评估所述链路状态,并根据评估结果更新所述无人机协作组的无人机及每架无人机的协作任务。本发明可靠性强,通信质量高,能较好地适应可视导航中的无人机集群通信环境。

一种可进行太阳能跟踪的无人机,包括无人机机身、主旋转电机、固定座、光敏感应器、翻转式太阳能电池板、电池板固定框、侧旋转电机、固定架、升降气缸和机翼,无人机机身上有主旋转电机,固定座固定在主旋转电机的转轴上,翻转式太阳能电池板成排固定在电池板固定框内,电池板固定框两侧有侧旋转电机,侧旋转电机的转轴固定在电池板固定框侧端中部,电池板固定框两侧的固定架下方有升降气缸,升降气缸固定在固定座上,固定座上有4个光敏感应器。本发明无人机顶部太阳能跟踪机构的翻转式太阳能电池板成排设置可同时进行翻转,而水平面旋转则由主旋转电机进行控制,从而能最大限度的对太阳能进行收集,并且成本更为低廉,安装更为方便。
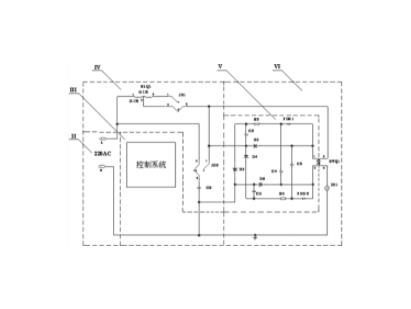
本发明是一种高压气体放电灯启动系统,电感镇流器(ZLQ1)的中间抽头2脚连接到第一继电器(JD1),电感镇流器(ZLQ1)的输出引脚3与第一继电器(JD1)相连;第一继电器(JD1)的公共引脚3分别与变压器(BYQ1)的副边3脚以及第二继电器(JD2)相连;第二继电器(JD2)的公共引脚3与功率因数补偿电容(C0)一端相连,功率因数补偿电容(C0)另一端连接交流电源输入端口(II)。利用电感镇流器必须有的功率因数补偿电容,与电感镇流器中间抽头分出的合适电感量,产生串联谐振,电容谐振高电压加于灯泡两端。并在灯泡两极间,跟随灯泡电压交流正负极方向变化,高压触发放电,将灯点亮,实现了灯泡热启动。
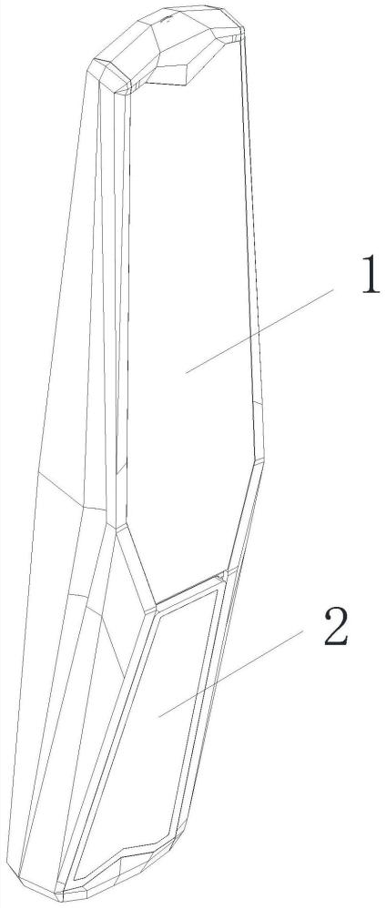
一种隐藏式智能把手及智能锁,包括壳体及设置在壳体内的隐藏式智能把手机构,隐藏式智能把手机构包括隐藏式翻盖、转轴、转动块、插块、连杆、偏转块、电机、推杆、锁紧块、联动板及齿轮组,转动块转动时能够推动联动板移动从而带动齿轮组转动,电机能够驱动偏转块转动,偏转块带动连杆及插块旋转,实现插块与转动块的锁止与解锁,偏转块同时带动推杆移动,实现锁紧块与隐藏式翻盖的锁止或解锁。该隐藏式智能把手及智能锁通过特殊设计的隐藏式智能把手机构,能够将把手与锁体结合为一体,使用时,隐藏式翻盖自动翻出,转动隐藏式翻盖即可实现解锁,使用安全方便,具有推广使用价值。



