
使用GPS定位信息和轨道电子地图准确地计算车辆所在位置的公里标。在空旷的行驶环境中,结合轨道电子地图、站点停车等消息消除GPS定位漂移点,要求精度5米,要求在去除漂移点之后,3秒钟之内必须有一包准确的数据。 在高楼遮蔽等不良情况下,能使用的差分纠正提高定位精度,在达到上述精确性(5米内)和稳定性(3秒内必有数据)。目前已开展一部分研发工作,但存在很多问题,需求相关专家指导。

面向电力与能源行业,针对目前输电线路巡检任务繁重,人工巡检劳动强度大、巡检质量低等问题,开发研制一种眼输电线路行走巡检机器人及辅助系统,降低劳动强度,提高巡检质量,实现输电线路自动巡检与检测并开展示范应用。降低人工成本,提高巡检质量。具体需求目标如下:1.开发研制一种具有三臂结构的巡检机器人,该机器人能够携带各种工具沿110KV以上的高压输电线路行走,自动跨越线路上各种障碍和金具,对线路周围环境及线路金具锈蚀、破损等状态进行采集与分析。2.机器人运动控制系统设计。以工控机为控制核心,采用独立运动控制系统,实现机器人的越障、调速、定位、电源管理和自动充电功能。3.以工控机为核心,包括可见光摄像机、深度摄像机、图像采集卡,采用VS和OpenCV开发视觉检测软件,实现线路金具的识别与定位、线路姿态的检测,并将识别结果实时传送至机器人运动控制系统,同时具有模型训练、模型加载、参数调整等功能。4. 申请自主知识产权7项以上,申报工业产品外观设计1项。
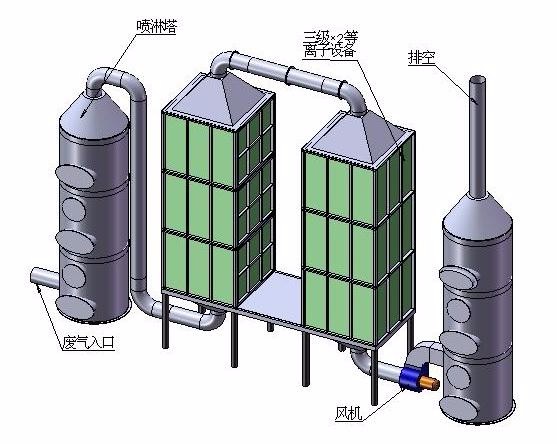
主要面对情况: 1、整个车间,不同工艺生产产生的多种废气处理,在不能收集时的大气量换气处理。 2、减少同一公司多个排气口的不环保现象。 3、多个车间,不同工艺产生的综合废气处理,且气量大。 14 4、减少劳动强度,实现精准控制,配套自控装置。基本情况及要求: 1、废气成分:有机酸、无机酸、挥发性溶剂气体、多种有机废气等综合 成分废气; (科技成果评价)2、处理量:整个公司或多个车间的综合废气汇总处理,处理量在 50000m³/h—300000m³/h; 3、废气排放达到国家标准; 4、整个过程要实现自动化控制;1、希望与解决实际问题的高校、科研院合作。 2、专家及团队所属领域和水平的要求:国内领先。
半导体元器件封装过程中使用焊膏(Solderpaste)将芯片固定在框架载片台上,在焊膏回流过程中出现助焊剂、锡珠飞溅到框架和芯片表面,芯片和框架表面沉积助焊剂,在后续药水清洗过程中能清洗大部分助焊剂,还或多或少残留少量助焊剂,导致铜线键合困难或焊点强度减弱。希望解决芯片和框架表面锡珠、助焊剂残留问题,芯片和框架表面达到无锡珠、无助焊剂残留。

通过底盘CAN总线读取实时数据,打通底盘与上装数据,对整车重要性能功能实行全面监控,实现联动、联控。主要技术难题有:(1)基于CAN总线和多感器的洒水车数据采集及智能控制技术。(2)基于视觉和红外感器的行人目标识别技术。(3)洒水车经济行驶速度分析技术。
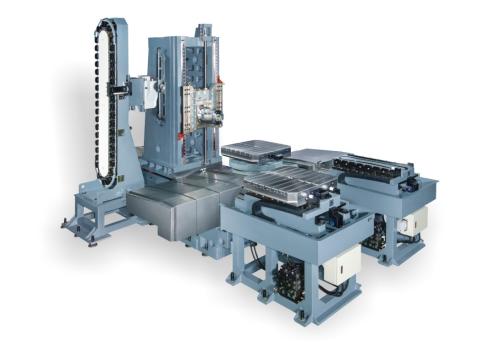
(1)技术目标:通过研发卧式加工中心的虚拟装配技术与变形控制技术,有效提高卧式加工中心的开发效率和质量。(2)技术内容:1.卧式加工中心虚拟装配建模技术研究,包括CAD模型信息提取与转换技术及软件接口开发、虚拟显示环境装配信息建模技术等;2.卧式加工中心虚拟装配交互技术研究,包括虚拟装配环境漫游技术、零部件装配运动控制技术、装配意图捕捉及运动导航技术、装配体识别技术等;3.卧式加工中心虚拟装配工艺设计技术,包括可装配性评估与验证技术、装配工艺信息记录技术、三维装配动画制作技术、三维装配工业设计与示教技术等;4.卧式加工中心虚拟装配系统开发;5.卧式加工中心整机热变形机理研究;6.卧式加工中心热变形控制方法研究。



